Spring and damping constants
I’ve had a lot of discord questions lately! Here’s a video with the answer to another common question, can the moteus controller be set to purely damp:
I’ve had a lot of discord questions lately! Here’s a video with the answer to another common question, can the moteus controller be set to purely damp:
In another discord moment, someone was asking about the difference between electrolytic capacitors and multi-layer ceramic capacitors. That, plus some desire to re-rate the moteus, inspired me to do another sweep and measure the DC bus voltage ripple for various power levels. I captured this plot with a 24V power supply, with a 5008 motor with 0.061 ohm of winding resistance or so, and each current being applied for 300ms. The voltage ripple is peak to peak measured at the power connector.
I’ve been wanting to build a dynamometer for a while to better characterize the performance of the direct drive and geared versions of the moteus controller. I have now started down that path with a torque transducer, which I calibrated with the below fixture:
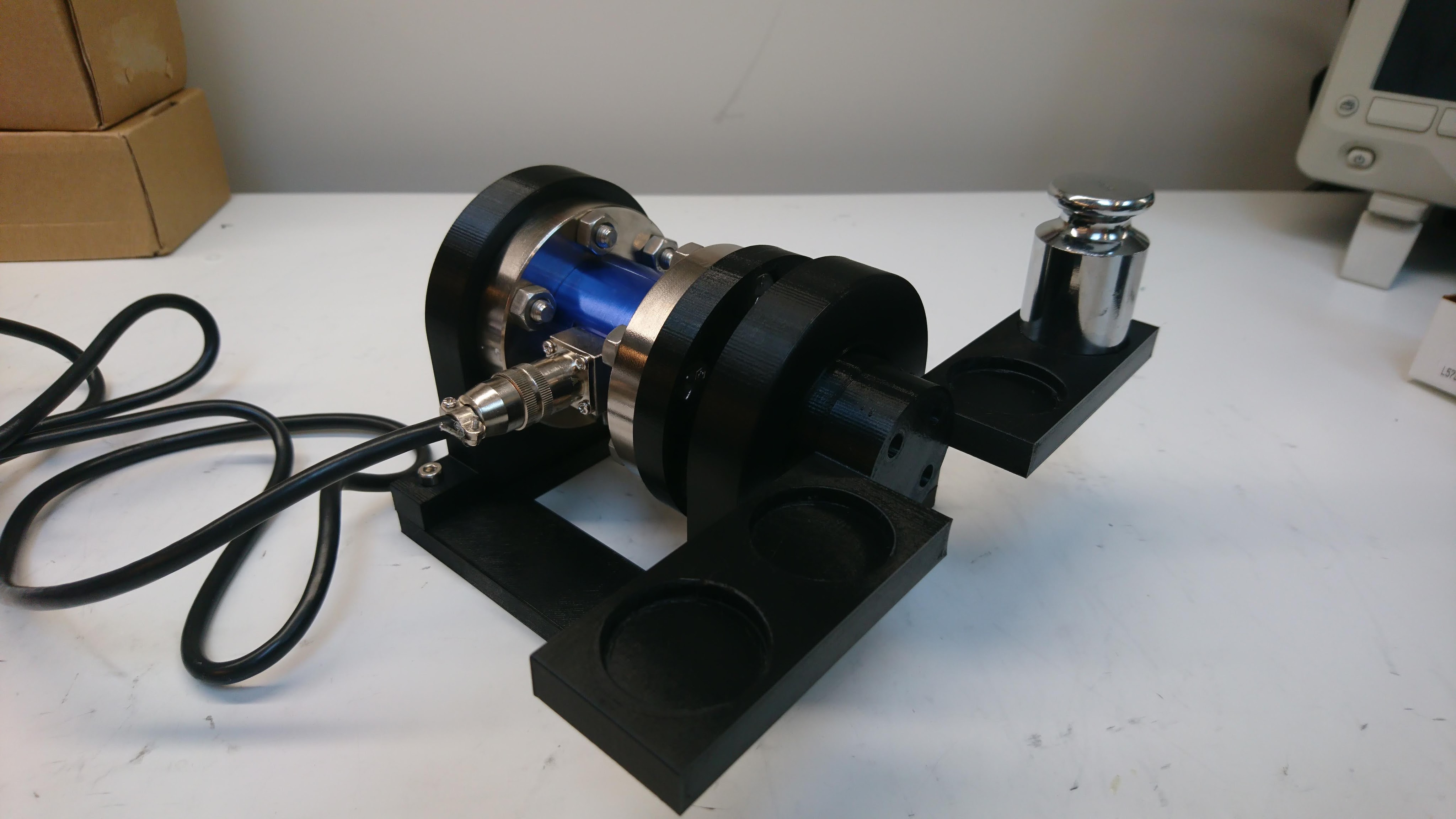
I got a what ended up being a low quality load cell amplifier to use with it from the same supplier, although discovered it was total garbage and am now using a SparkFun OpenScale board which seems to be working much better. Soon I’ll hopefully have something wired up that actually has a controller or two on it.
I saw a recent Skyentific video and decided to have a try at it myself, check out the result:
In my previous experiments demonstrating torque feedback (full rate inverse dynamics, ground truth torque testing), I’ve glossed over the fact that as the stator approaches magnetic saturation, the linear relationship between torque and current breaks down. Now finally I’ll take at least one step towards allowing moteus to accurately work in the torque domain as motors reach saturation.
The stator in a rotor consists of windings wrapped around usually an iron core. The iron in the core consists of lots of little sub-domains of magnetized material, that normally are randomly oriented resulting in a net zero magnetic field. As current is applied to the windings, those domains line up, greatly magnifying the resulting magnetic field. Eventually most of the sub-domains are aligned, at which point you don’t get any more magnifying effect from the iron core. In this region, the stator is said to be “saturated”. You can read about it in much more depth on wikipedia or with even more detail here. The end result is a curve of magnetic field versus applied current that looks something like this:
My initial design torque for the qdd100 was a little over 17 Nm. However, when I did my first ground truth torque testing, I found that some servos had a lower maximum torque than I had specified. While working to diagnose those, I built a qdd100 that used an alternate stator winding of 105Kv instead of the 135Kv that are in all the beta units. The Kv rating of a stator describes how fast the motor will spin for a given applied voltage. If you assume the same amount of copper mass of wiring, a lower Kv will mean that there are thinner wires that wrap around the stator more turns (or fewer wires in parallel). A higher Kv will have thicker wires with fewer overall turns.
Someone contacted me not too long ago who wanted to use the moteus controller, but wasn’t sure if it would be able to hit their target mechanical velocity of 6000rpm. I honestly wasn’t either, so I tested it. After a quick firmware fix, the devkit motor when run at 34V seems to be able to do it no problem.
It should be noted that the current firmware assumes you are within a thousand or so revolutions of 0. You can exceed that pretty quickly running at 120 revolutions per second!
One of my goals with mjbots is to make building dynamic robots more accessible to researchers and enthusiasts everywhere. To make that more of a reality, I’m lowering the prices in a big way on the foundational components of brushless robotic systems, the moteus controller and qdd100 servo.
| Old | New | |
|---|---|---|
| moteus r4.3 controller | $119 | $79 |
| moteus r4.3 devkit | $199 | $159 |
| qdd100 beta | $549 | $429 |
| qdd100 beta devkit | $599 | $469 |
Don’t worry, if you purchased any of these in the last month, you should be getting a coupon in your email equivalent to the difference.
https://shop.mjbots.com is now https://mjbots.com (don’t worry, the old site redirects)! The functionality is largely the same, you can still get your qdd100 actuators or moteus controllers. The biggest differences are 1) it looks slightly nicer, and 2) shipping rates are improved, and international shipping rates drastically so. For instance, DHL “Express” 2 day shipping to some points in Europe is now under $35 USD, whereas previously 2 day shipping was over $300. That is often cheaper than even USPS International Priority – which is typically 2-4 weeks.
It seems that I’m learning much about PCB design the very hard way. Back last year I wrote up my discovery of MLCC bias derating. Now I’ll share some of my experiences with MLCC cracking on the first production moteus controllers.
When I was first putting the production moteus controllers through their test and programming sequence, I observed a failure mode that I had yet to have observe in my career (which admittedly doesn’t include much board manufacturing). When applying voltage, I got a spark and puff of magic smoke from near one of the DC link capacitors on the left hand side. In the first batch of 40 I programmed, a full 20% failed in this way, some at 24V, and a few more at a 38V test. I initially thought the problem might have been an etching issue resulting in voltage breakdown between a via and an internal ground plane, but after examining the results under the microscope and conferring with MacroFab determined the most likely cause was cracking of the MLCCs during PCB depanelization.