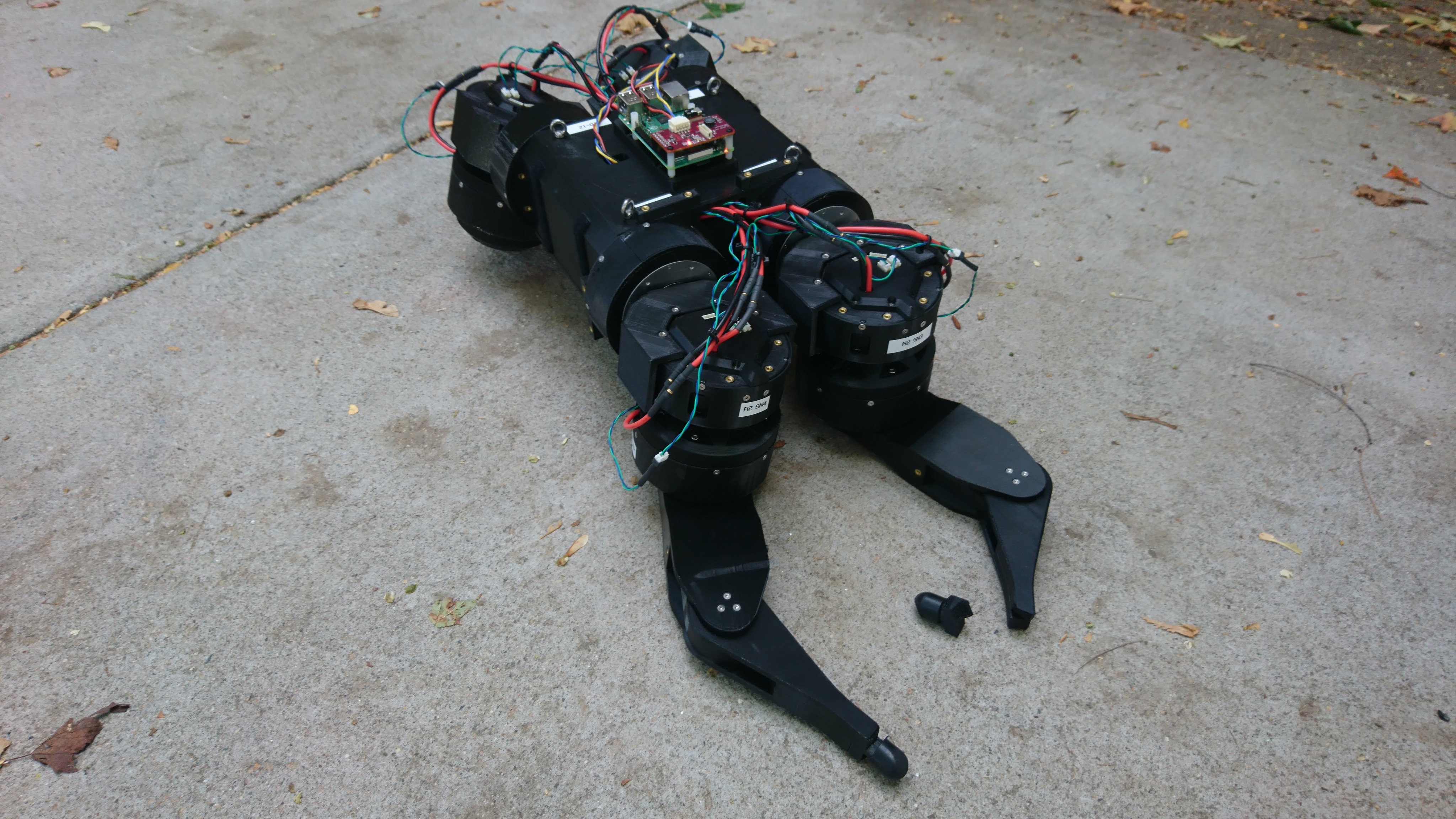
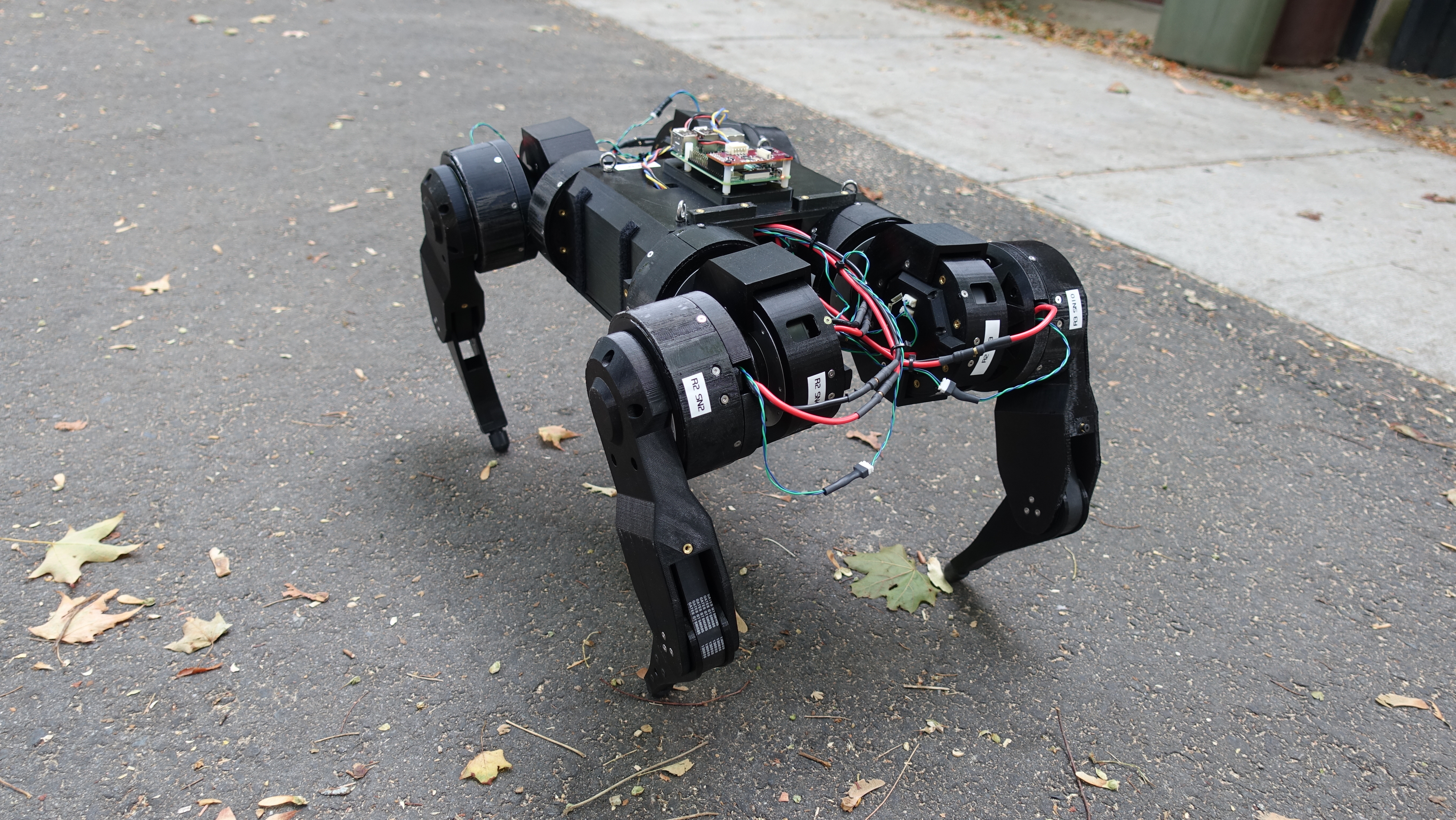
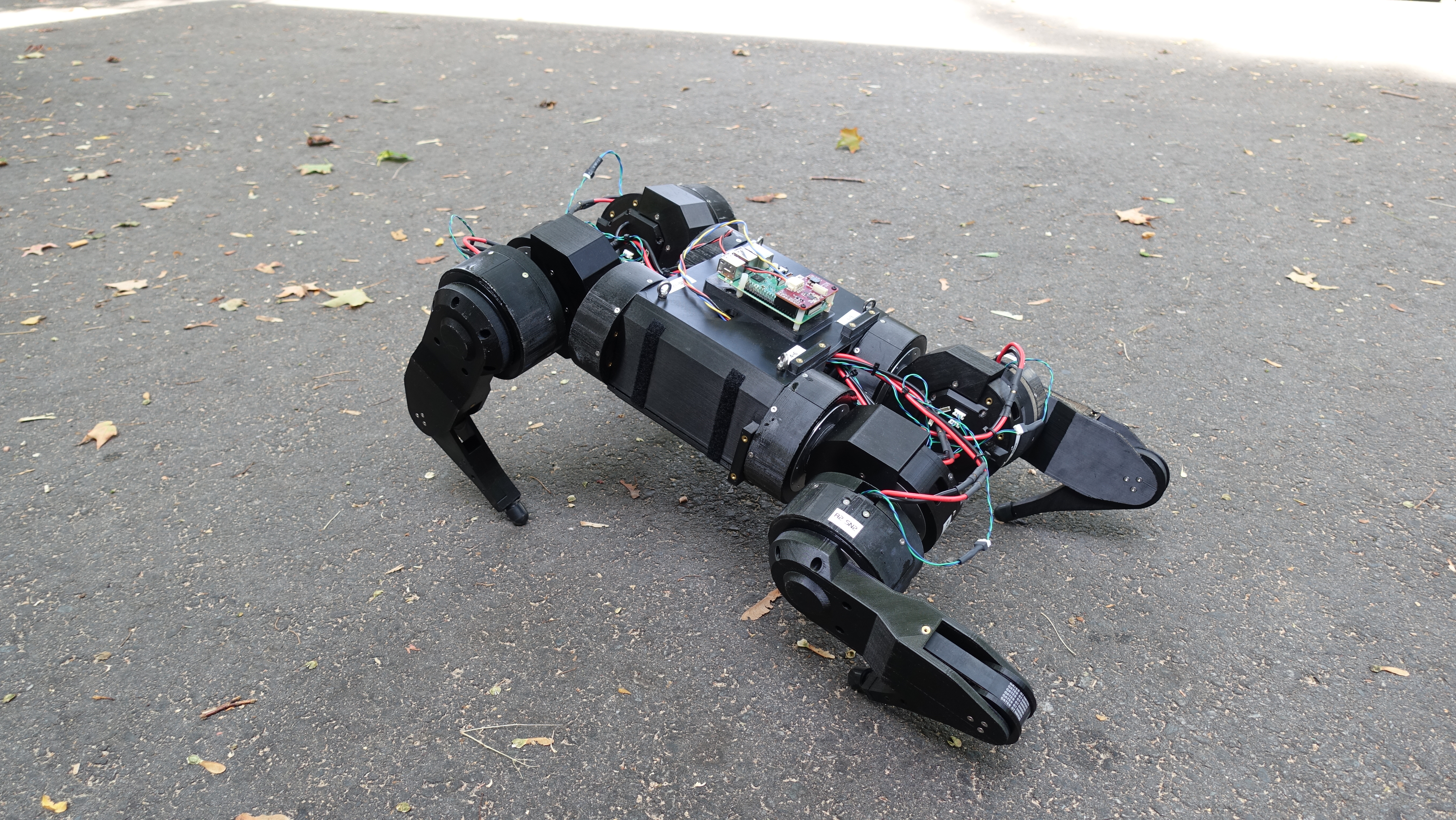
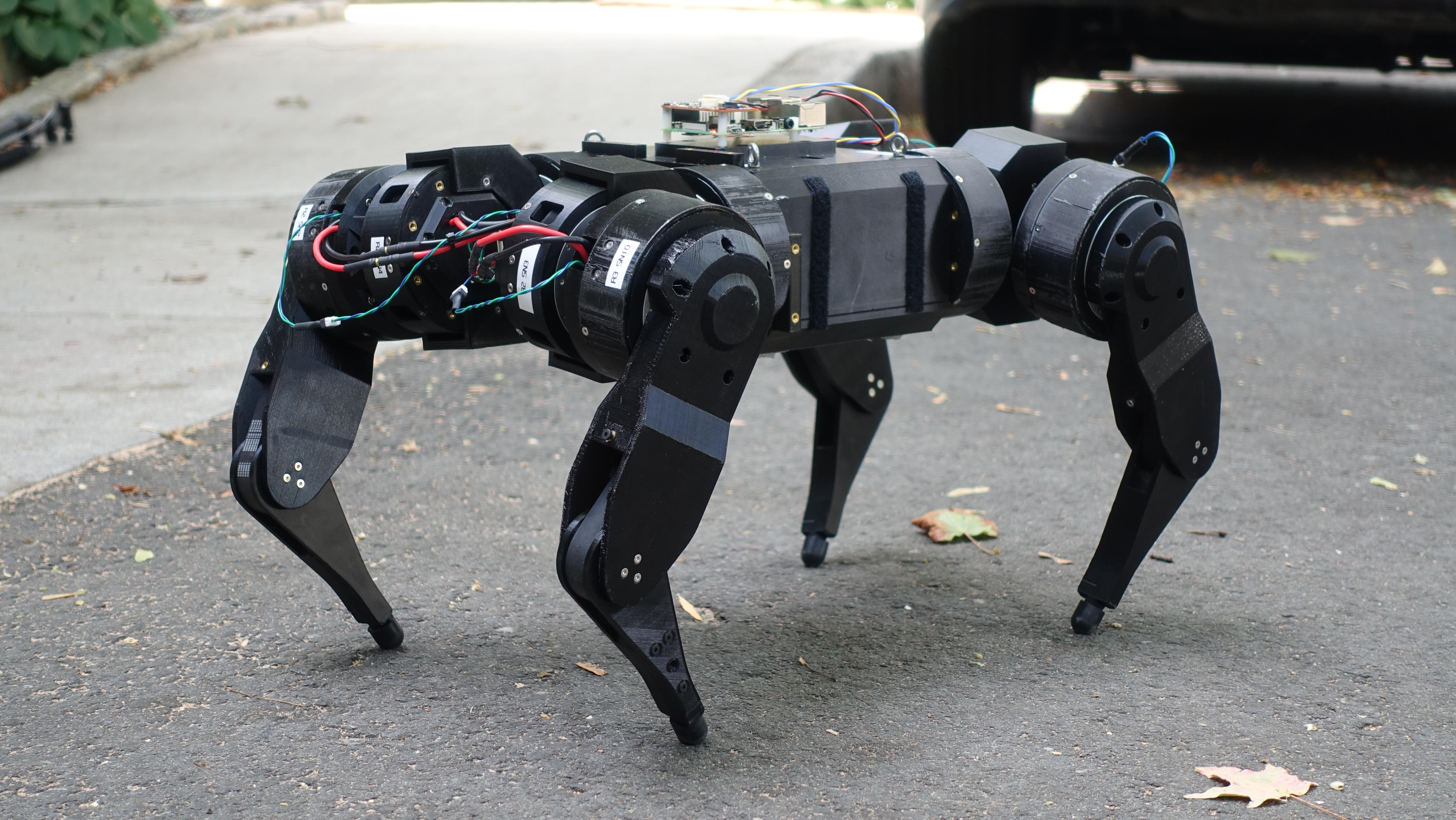
quad A0 - Controlled jump
Now that I have a full rate inverse kinematics and dynamics solution, I can begin to do more interesting things. A while ago I did the first jump on the quad A0 – in that video I used a limited technique just to verify that the platform was indeed capable of jumping. The joints were commanded in an open loop fashion, and really only at the transition points of the jump sequence, relying on the control loops in the servo to actually achieve each stage of the jump cycle. That resulted in the jump only being minimally controlled… tracking errors would result in the robot taking off from a not-level position and the timing was not super reliable to boot.