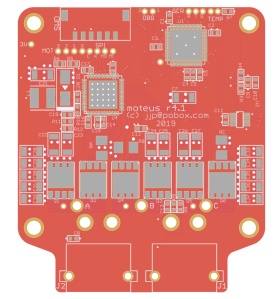
CAN bootloader for moteus r4.x
One final piece of porting that needed to happen for the moteus controller r4.x series was the bootloader. The r3.x series has a bootloader, which allowed re-flashing the device over the normal data link, but that was largely specific to the RS485 and mjlib/multiplex framing format. Thus, while not particularly challenging, I needed to update it for the FD-CAN interface used on the r4.x board.
The update itself was straightforward: https://github.com/mjbots/moteus/compare/406f01…1123a9
For now, on the assumption I will in the not too distant future deprecate the r3.x series, just duplicated the entire bootloader, replacing all the communication bits with FDCAN and stm32g4 appropriate pieces. As before, this bootloader is designed to only operate after the normal firmware has initialized the device, and also is required to be completely standalone. To make code size easier to manage, it makes no calls to any ST HAL library and manipulates everything it needs purely through the register definitions.