TLDR: As of firmware 2026-01-21 moteus now has a maximum modulation depth that is 6% larger than before. That means the maximum speed for a given voltage is that much higher. Read on for the effort invested in making that happen.
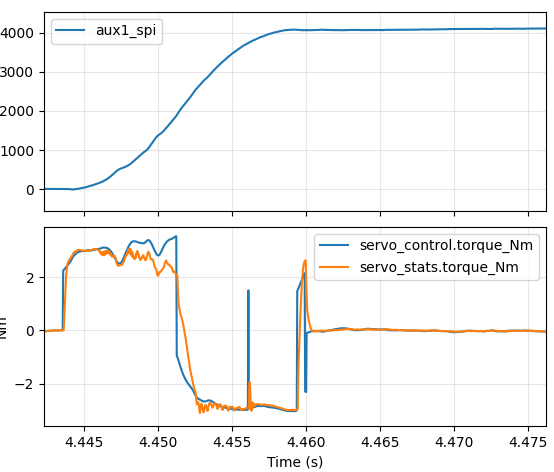
Back in 2022 moteus added support for acceleration limited trajectories. This was a highly requested feature and has been used for all sorts of applications since. However when working on the recent trajectory optimization effort it became obvious that there were still some lingering stability issues on two fronts. First, when decelerating, there would occasionally be single control cycles where an acceleration was instead commanded. Second, termination at the end of a move would often involve small amounts of overshoot or oscillation. You can see both in one of the plots from that post here:
Acceleration instability
I’ve known about this for several years now, and occasionally have spent a few minutes trying to think of alternate formulations that would be more stable. With my recent attempts to use Claude Code, I thought maybe it could help here too since at least this part of the firmware is entirely tested by host side unit tests? Well, the answer was I suppose it did help, but not exactly in the way I originally intended. Read on for more details, or upgrade to moteus firmware 2026-01-21 if you just want the fixes.
Recently I announced an updated version of the moteus performance
analysis tool. It’s development was unique in that I used
the Claude Code agent to
do basically the entire project, modulo copying the simulation logic
from the original mpat tool. It was my first attempt at using any of
the LLM based coding agents and I have a few takeaways: