Rethinking dead time compensation in moteus
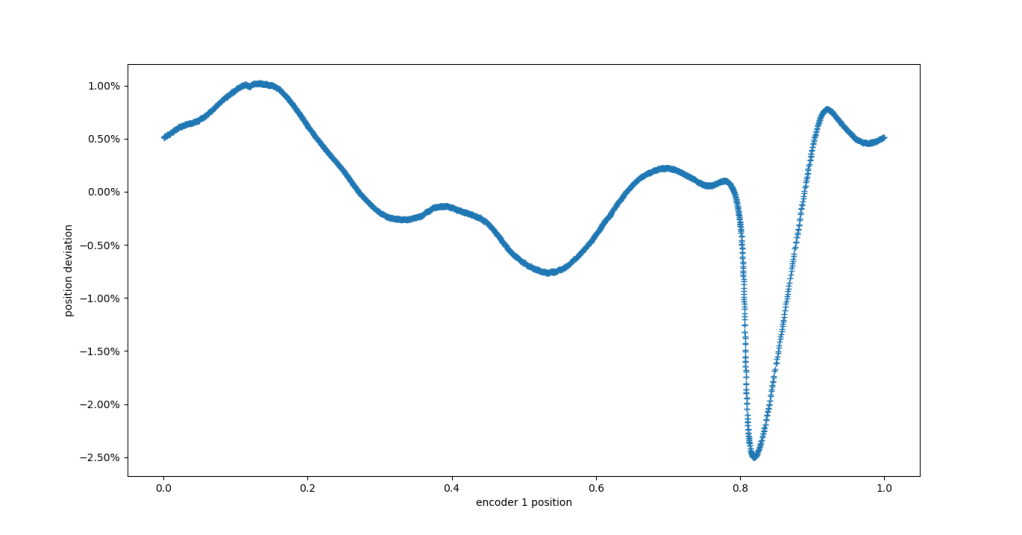
Way back in 2021, I wrote up a post detailing a method for improving the linearity of the relationship between applied voltage and current for moteus, particularly during the calibration phase. At the time, this did solve a real problem – during calibration, moteus applied a fixed voltage to the phase terminals, swept the electrical angle of that voltage, and hoped that the mechanical angle as sensed with the on-axis sense magnet matched well. However, as a result of some new work, I’ve found that the premise behind that approach was flawed and it needs some re-thinking. This describes what I found, and what’s being done to resolve it going forward.