Mech Warfare 2019 - First look
Well, Mech Warfare at Maker Faire 2019 has come and gone. Maker Faire was a really awe inspiring event, and RTeam did an excellent job organizing the Mech Warfare competition. There were something like 13 teams with moderately functioning mechs who competed across the 3 days.

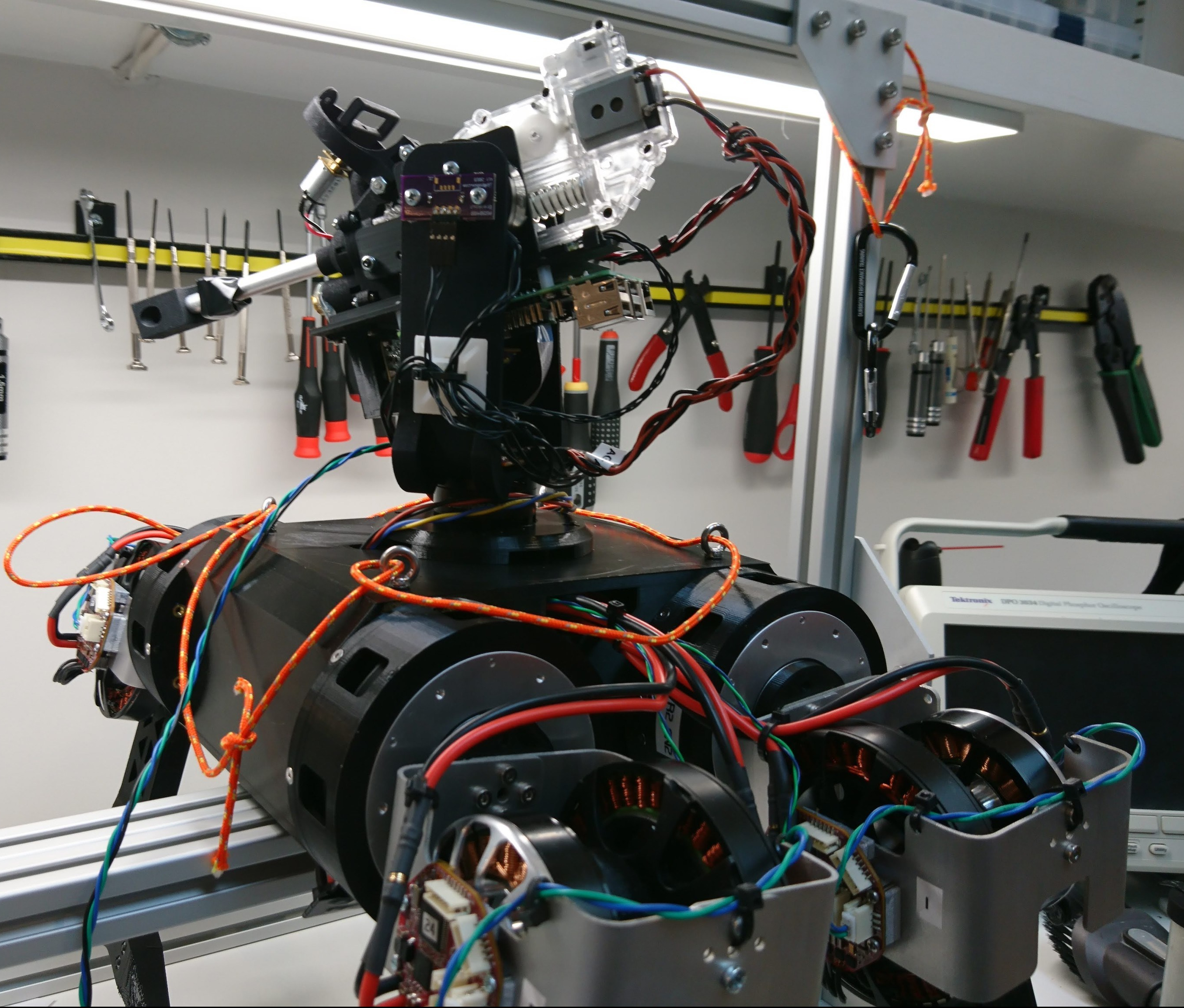
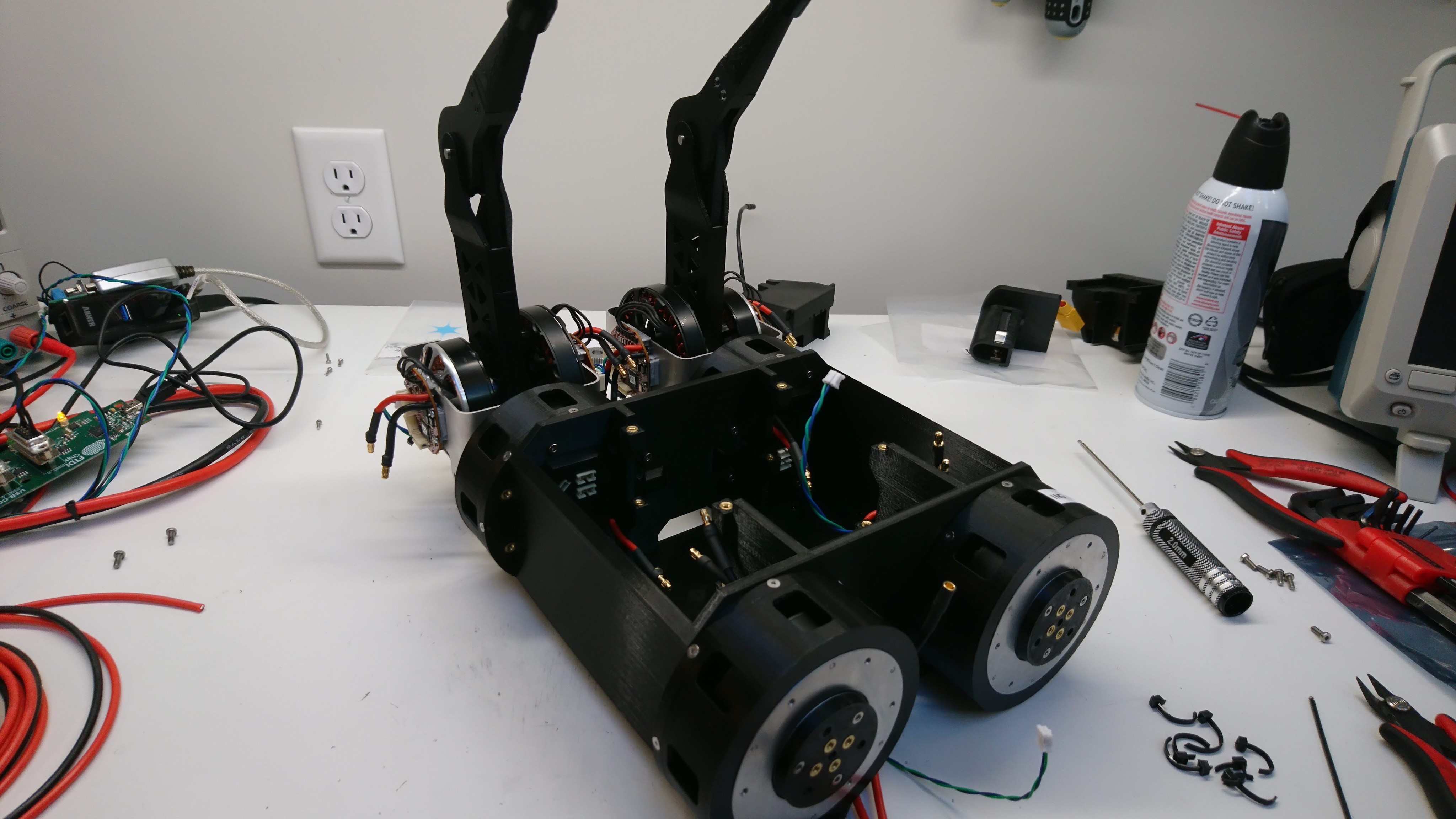
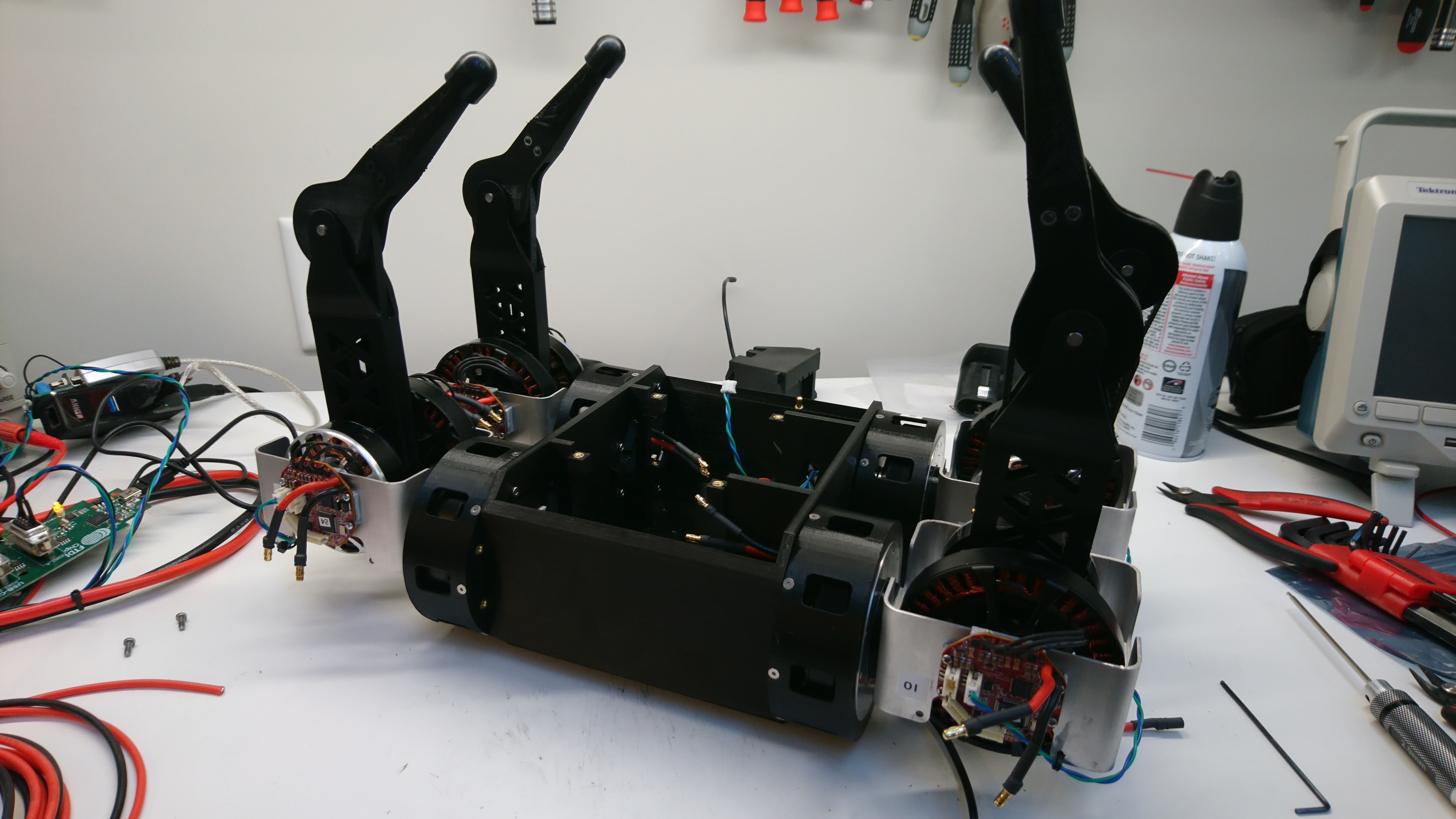
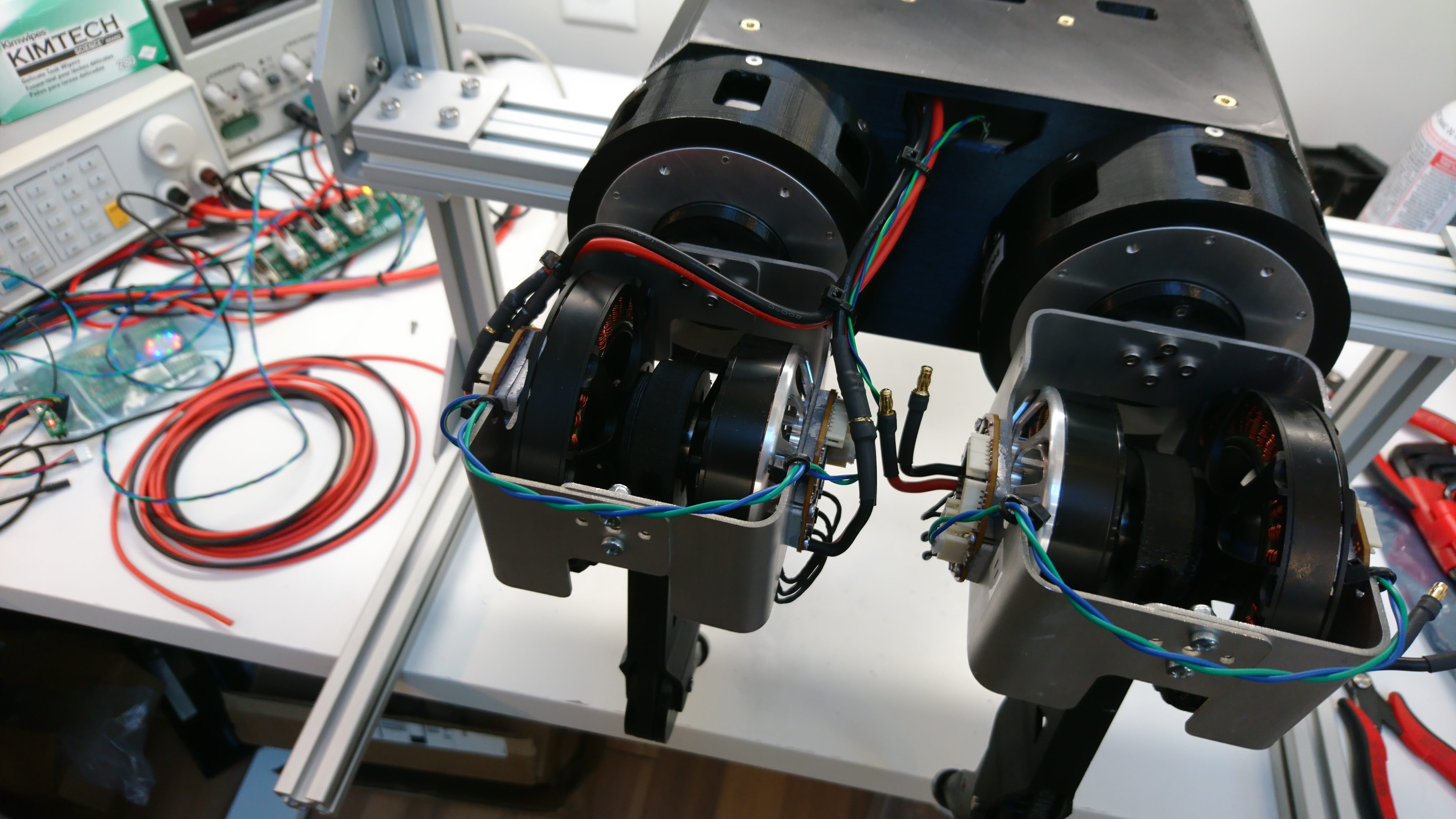
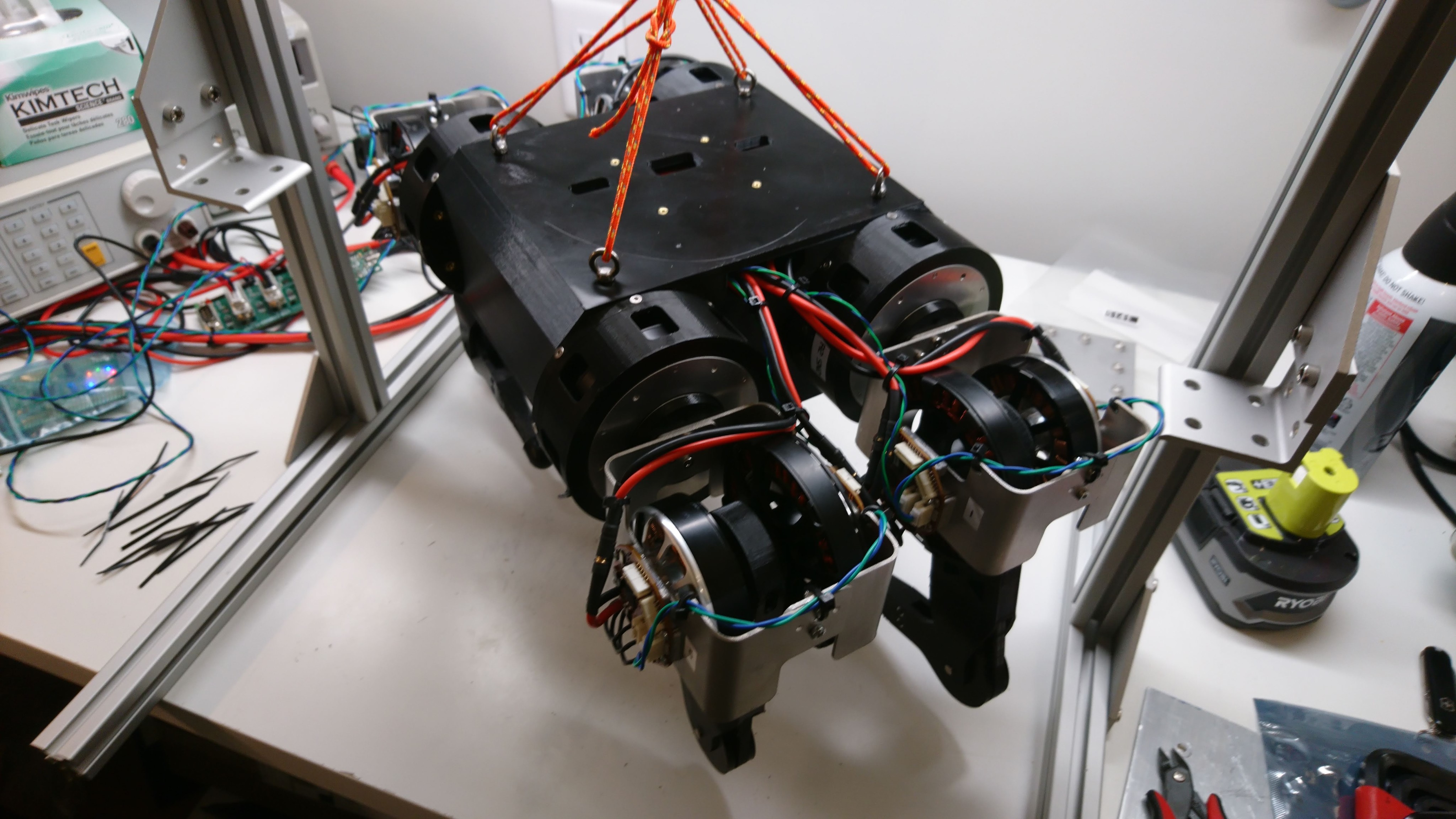
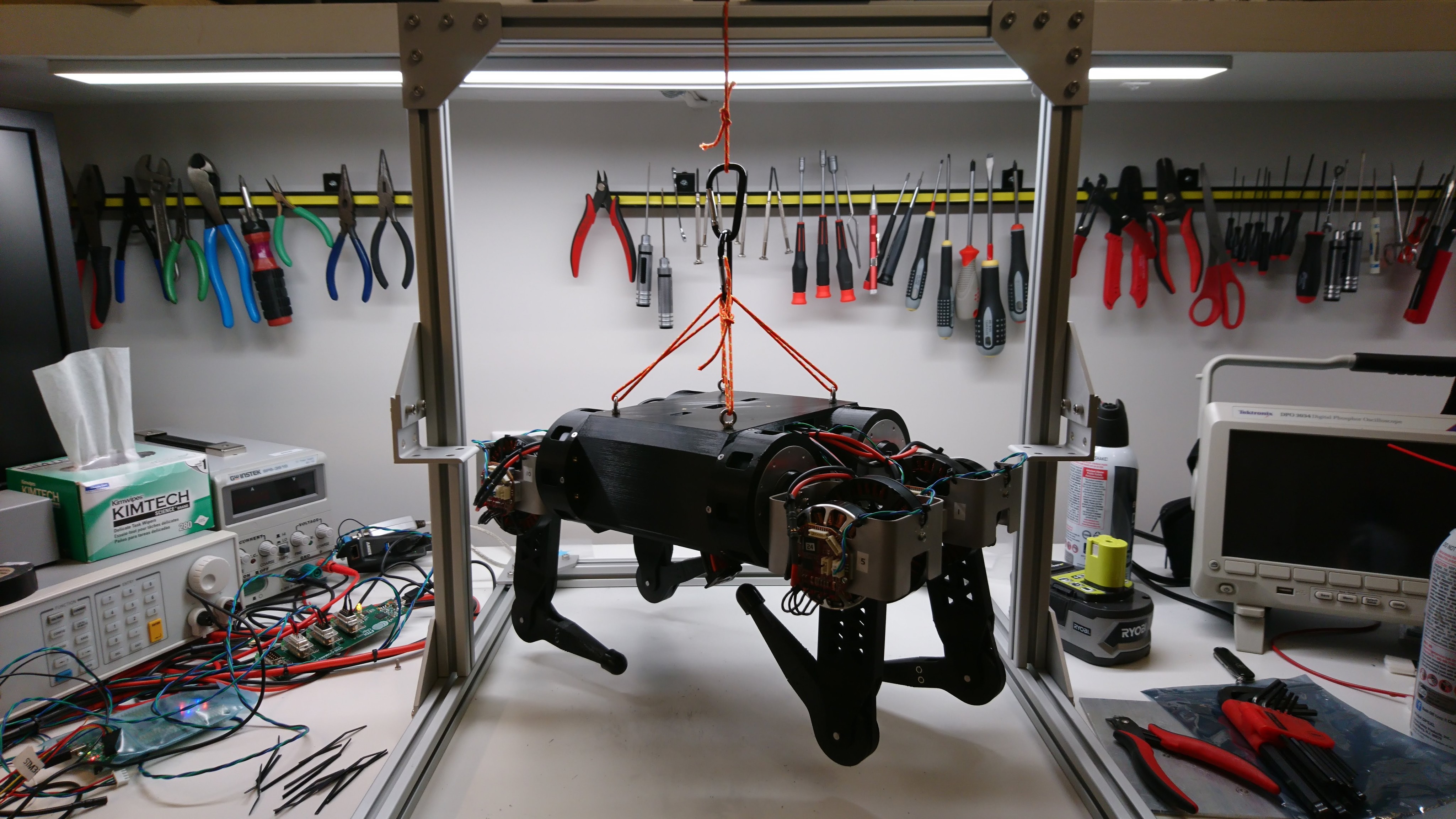
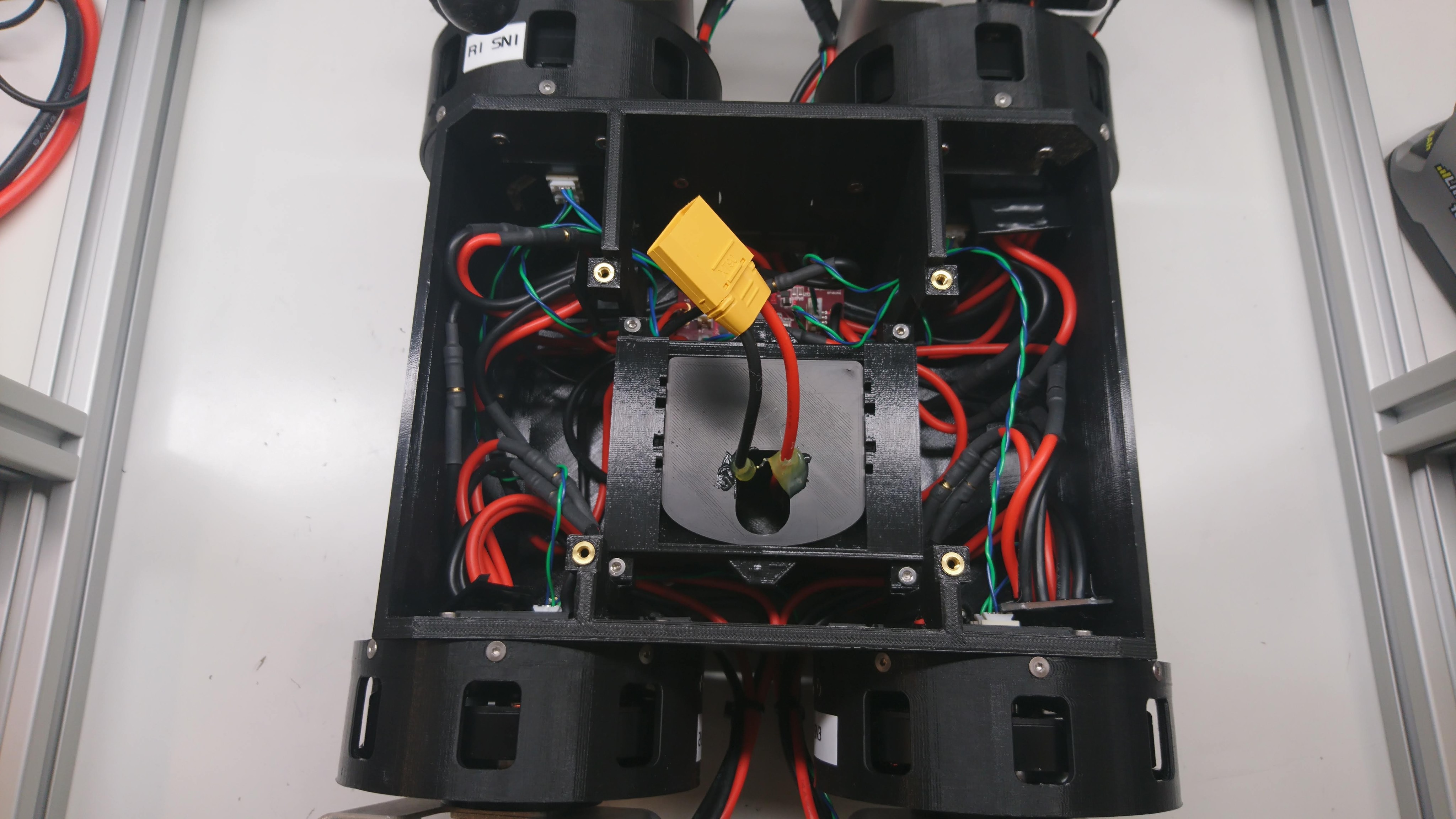
Super Mega Microbot “Junior”
My entry, Super Mega Microbot Junior, did manage to walk a bit in 3 matches, but had a previously unseen failure in the turret system that rendered it inoperable a short while into each match. At the end of the 3rd match, one of the leg joints sheared off, and some other of the 3D printed parts were about to fail as well, so I declared it unrepairable at that point.