Flexible I/O: Worked examples
NOTE 2025-10-29: An updated version of this post can now be found in the official moteus documentation:
First, if you haven’t already, check out these introductory posts:
- Part 1: Motivation
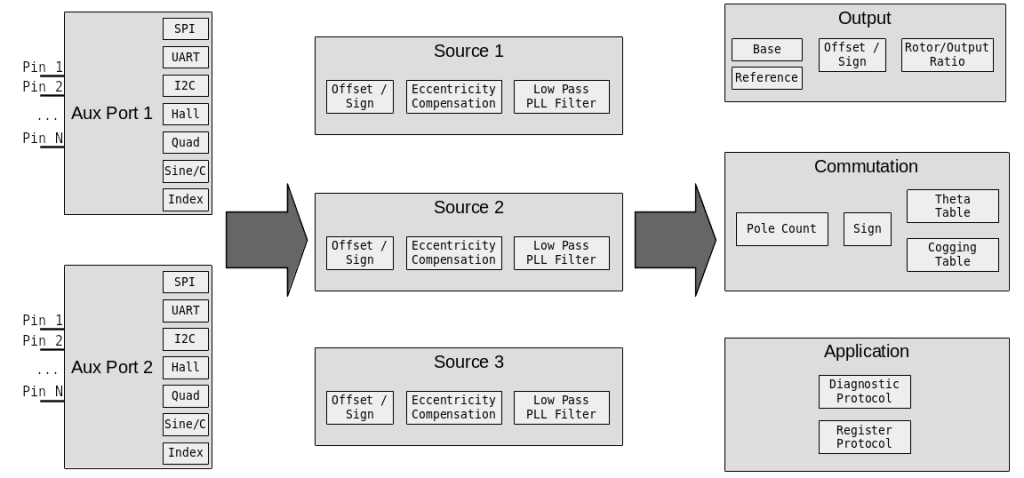
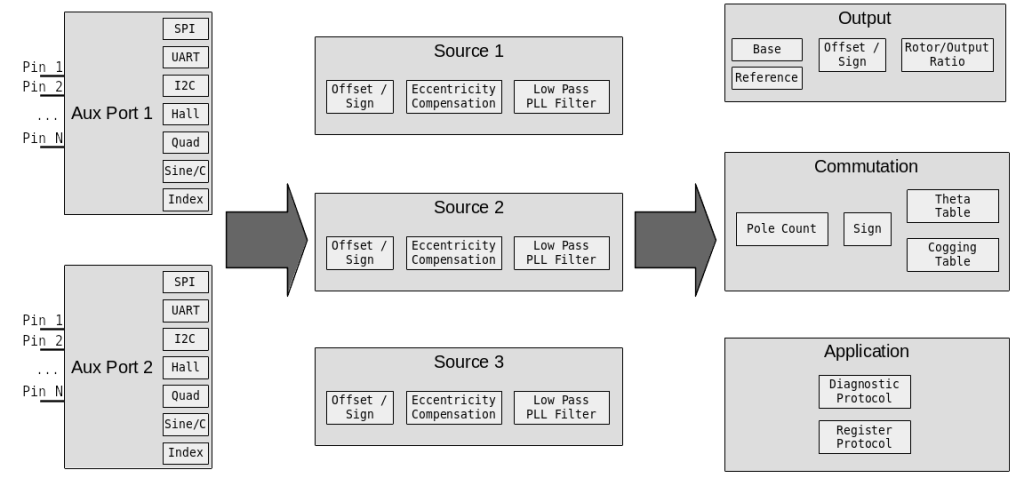
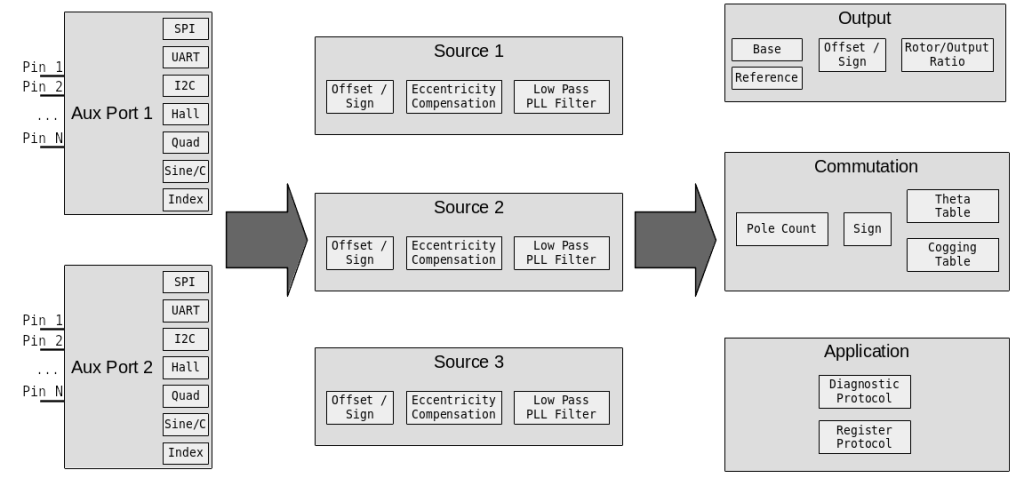
- Part 2: Auxiliary Port Configuration
- Part 3: Source Configuration
- Part 4: Sink Configuration
Second, this article is available in video form:
Third, the official reference documentation can be read here. This describes in detail all of the possible configuration values.