Fusion 360 3D adaptive and thin walls
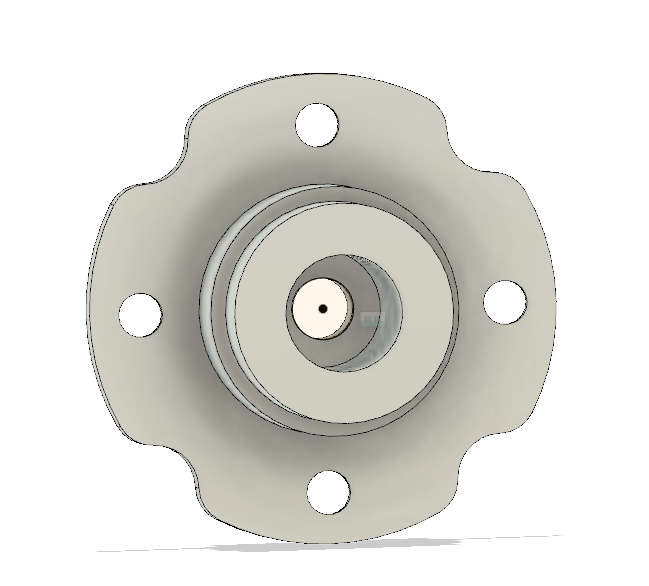
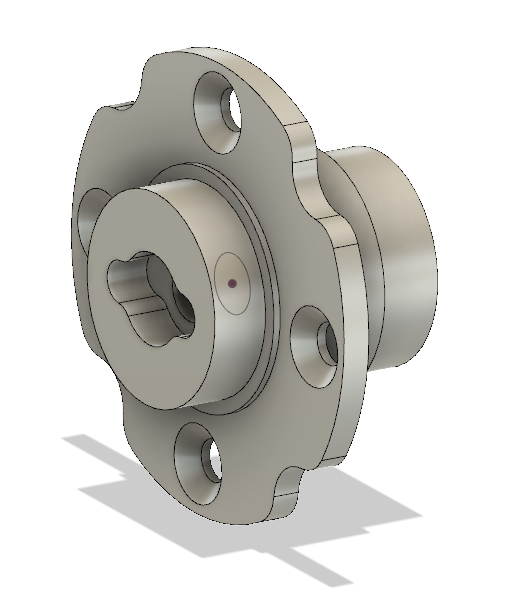
I have been trying to improve the tool paths for the BE8108 gearbox sun gear holder. The first time, I ended up slowing things down a lot and actually took some of the initial adaptive passes in several iterations as I fixed problems, so it wasn’t clear that any one iteration would be functional from start to finish.
So, I tried it on a fresh piece of stock, with settings that I thought would resolve the pullout issues I had seen earlier. Lo and behold, what did I find but more pullout! It appeared to happen in exactly the same situations as before. The adaptive clearance would leave a thin sliver of material, then “round it off” very rapidly, resulting in a large chunk of sliver hitting the mill at once. Increasing the minimum cutting radius and tolerance helped reduce the problems some, but didn’t get rid of them entirely.