Full rotation quadruped build continued
The next step in (re-)building the quadruped with a full rotation leg was getting all the motors ready. I had to first install reinforcing rings on 6 of the motors:

My epoxying station
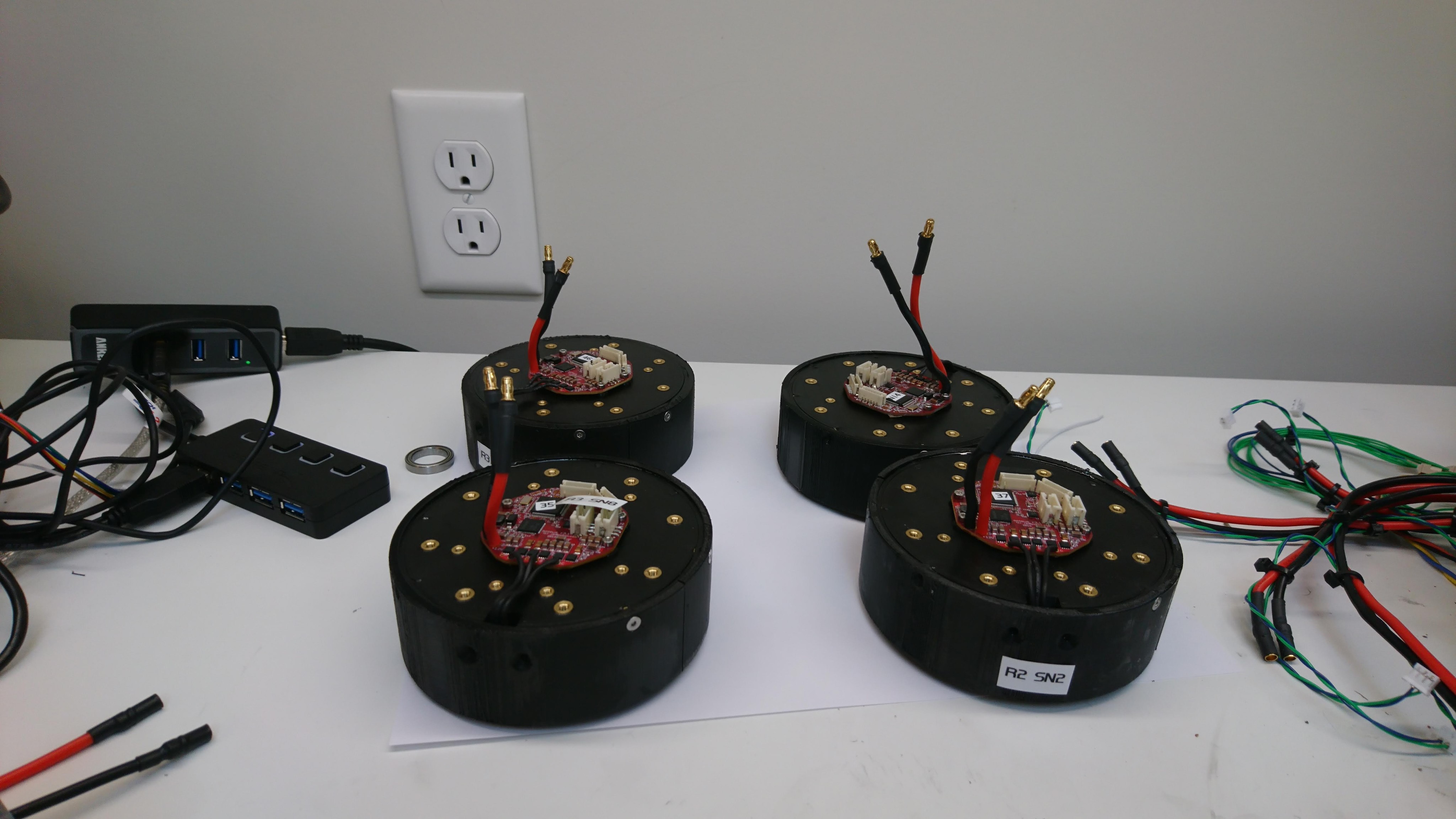
4x gearboxes with reinforcing rings installed
Then, I needed to lengthen the power leads on 3 of the motors to serve as the lower leg joint.
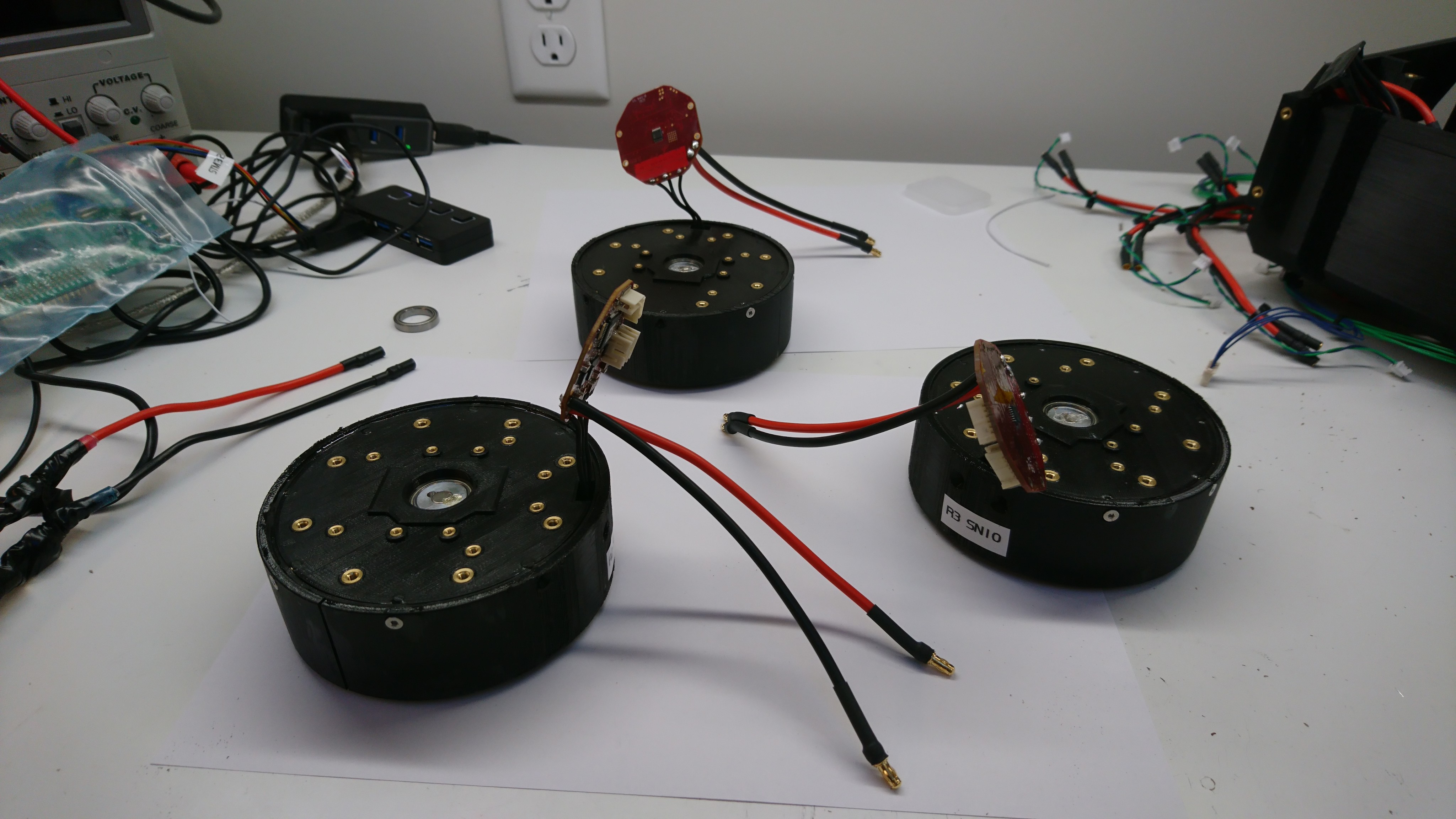
Motors with longer power leads
Then I had to assemble all the new legs:

Upper leg joints mounted

Lower leg joints mounted

All three remaining legs built
I mounted them all to the chassis:
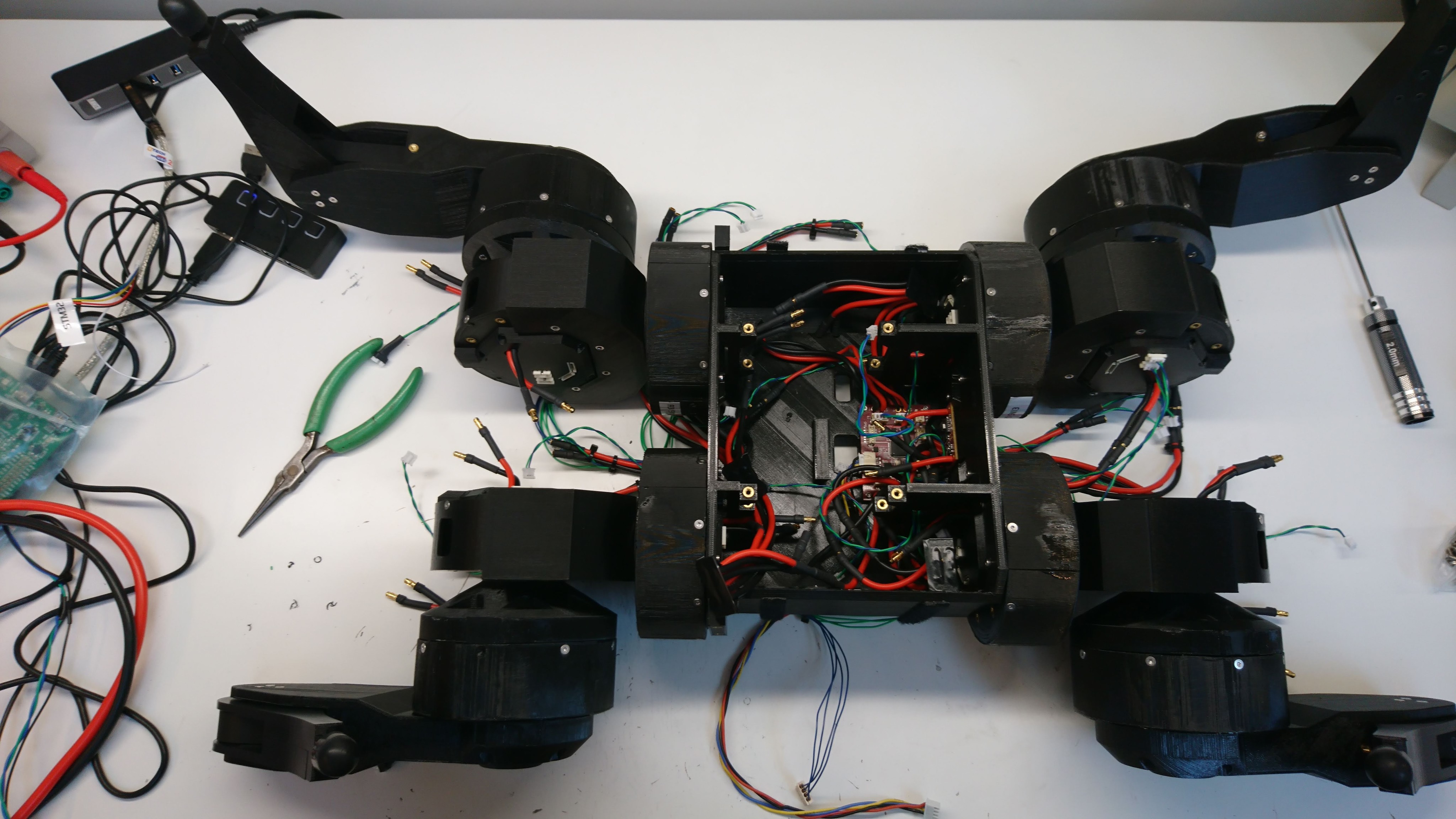
All the legs!
And then re-installed the battery stud and “resting” feet:

Next up, will be actually powering them and getting it to walk!