80/20 Robot Stand
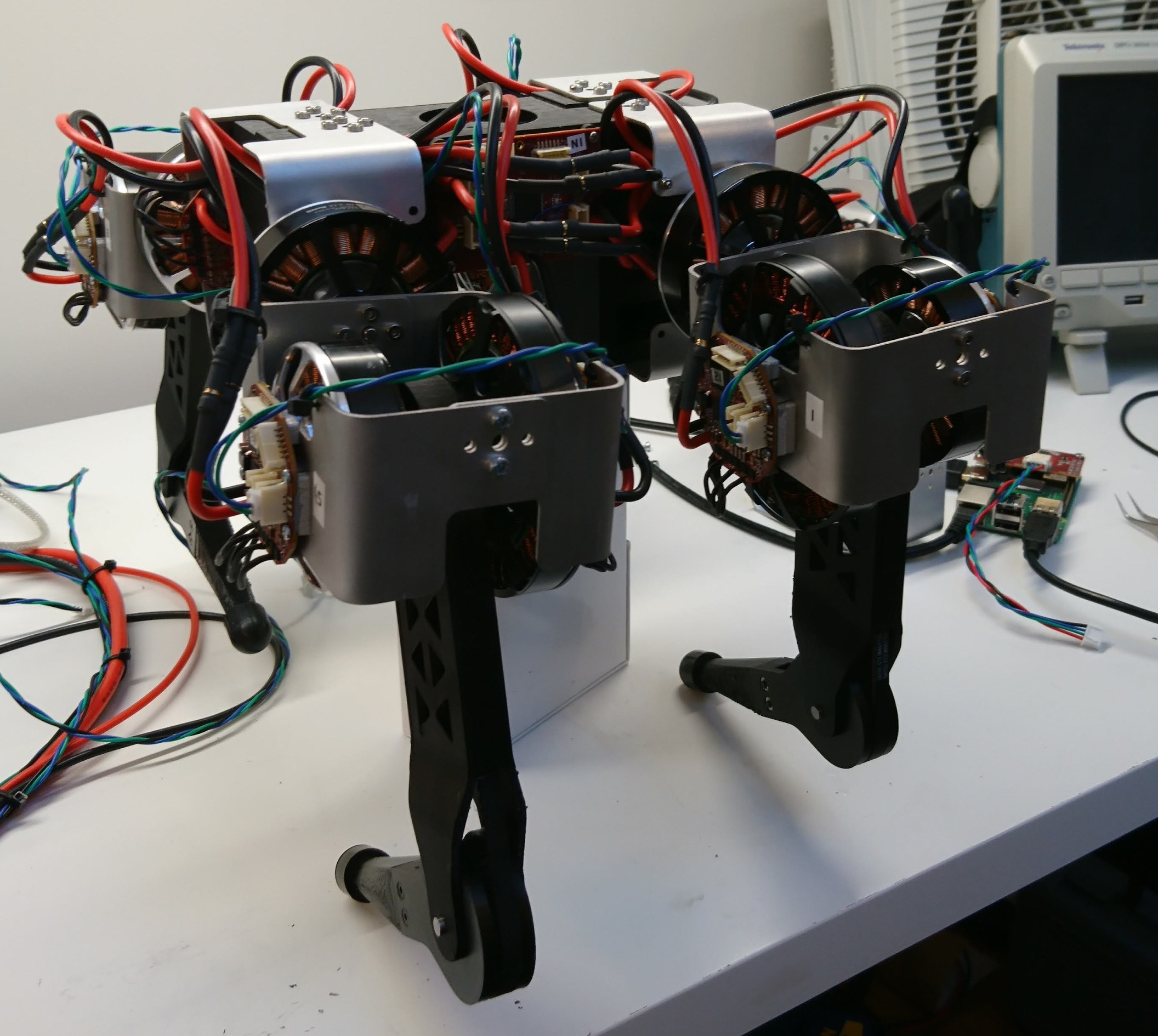
Now that I have a mostly-assembled (and even kinda-working) robot, supporting it with a series of impromptu cardboard boxes is both a little janky, as well as limiting and dangerous. The machine is not too hard to tip over, and the range of things that you can do while still having it supported is somewhat limited.
So, here’s yet another entry in the 80/20 can do it all series. This is a simple fixture that allows the machine to either rest on a platform, be supported from an overhead cable or both. This lets me both more easily operate on the machine, but also test it under power and not have to be worried about it falling over and damaging itself.