qdd100 beta 2
I’d like to introduce the qdd100 beta 2!
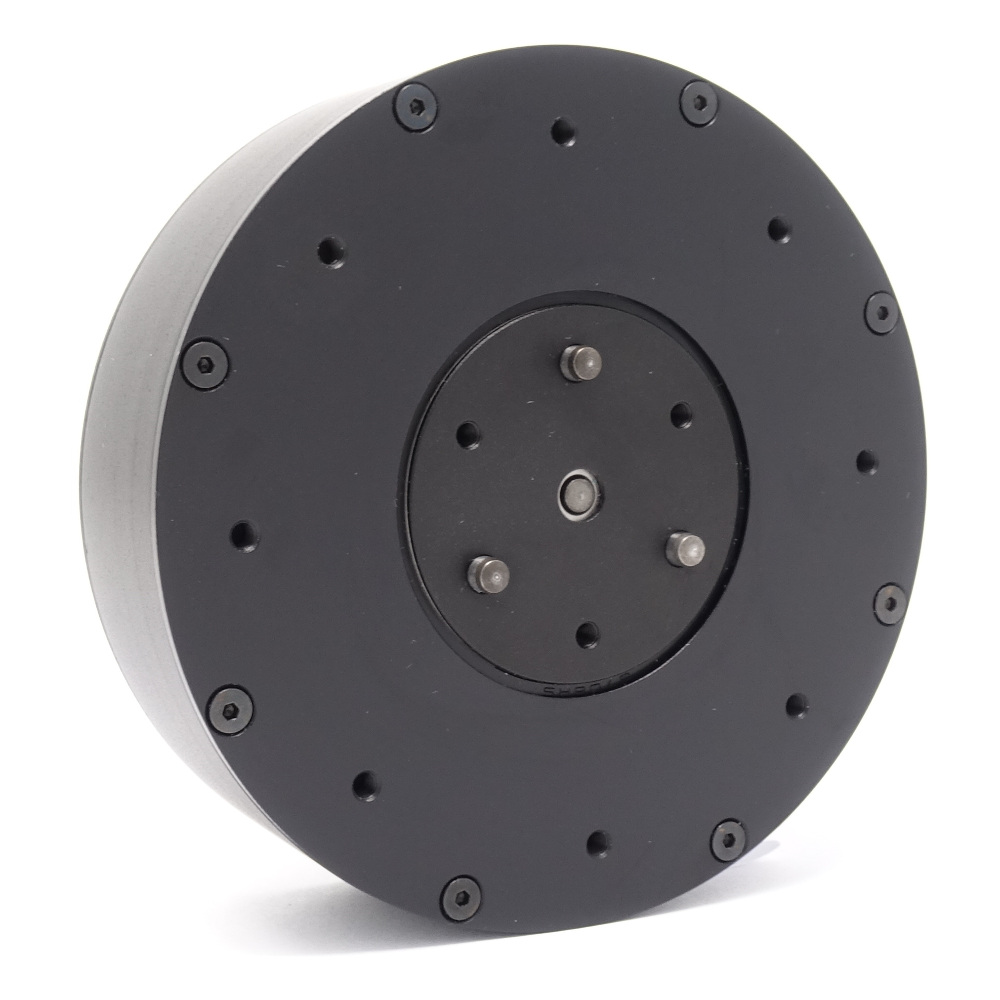

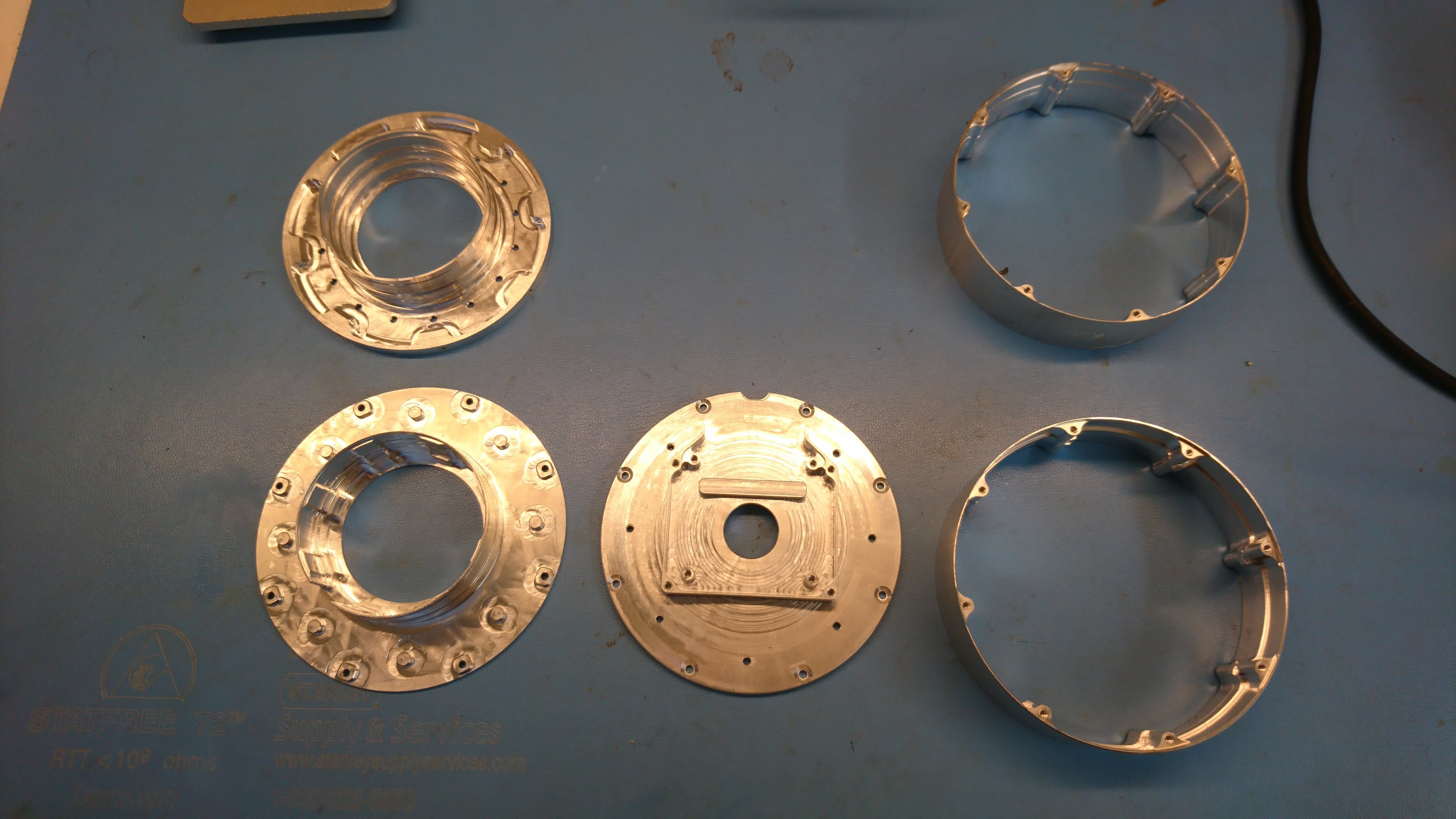
This is the newest version of a quasi-direct-drive servo from mjbots. It has a sleek new look, and improved performance all around:
| Beta 1 | Beta 2 | |
|---|---|---|
| Peak Torque | 12.5 Nm | 16 Nm |
| Backlash | +- 0.2 degrees | +- 0.1 degrees |
| Voltage Range | 10-34V | 10-44V |
| Mass | 470g | 475g |
Comparison from beta 1 to the new beta 2
Additionally, the M3 mounting holes are now 3mm deep instead of the previous 2mm, which gives more flexibility when designing mounts.