mjpower-ss
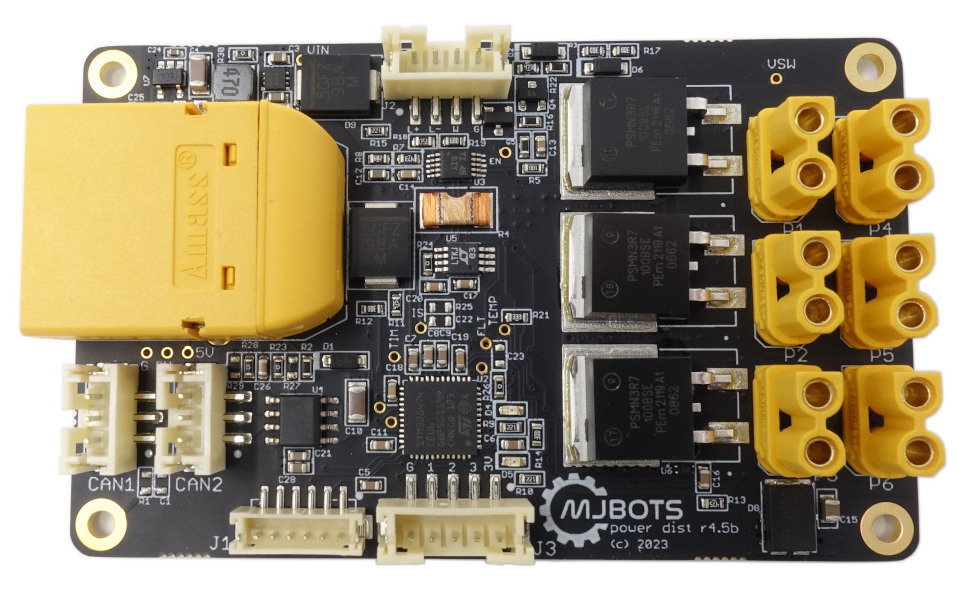
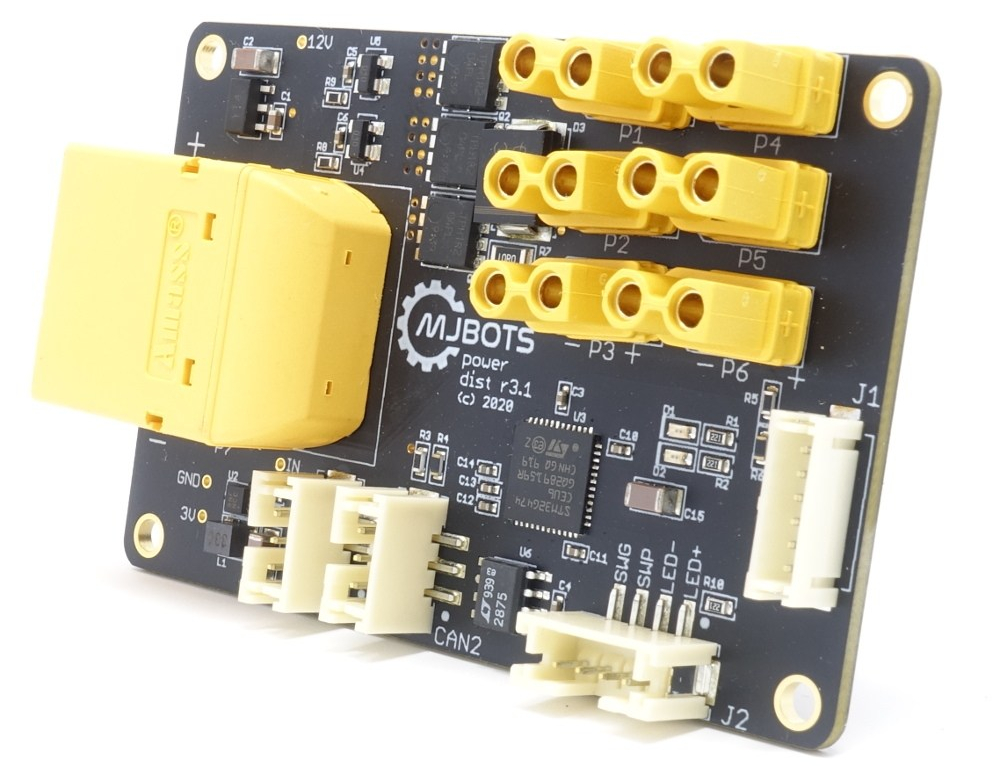
It’s another new product day here at mjbots! Introducing the mjpower-ss:

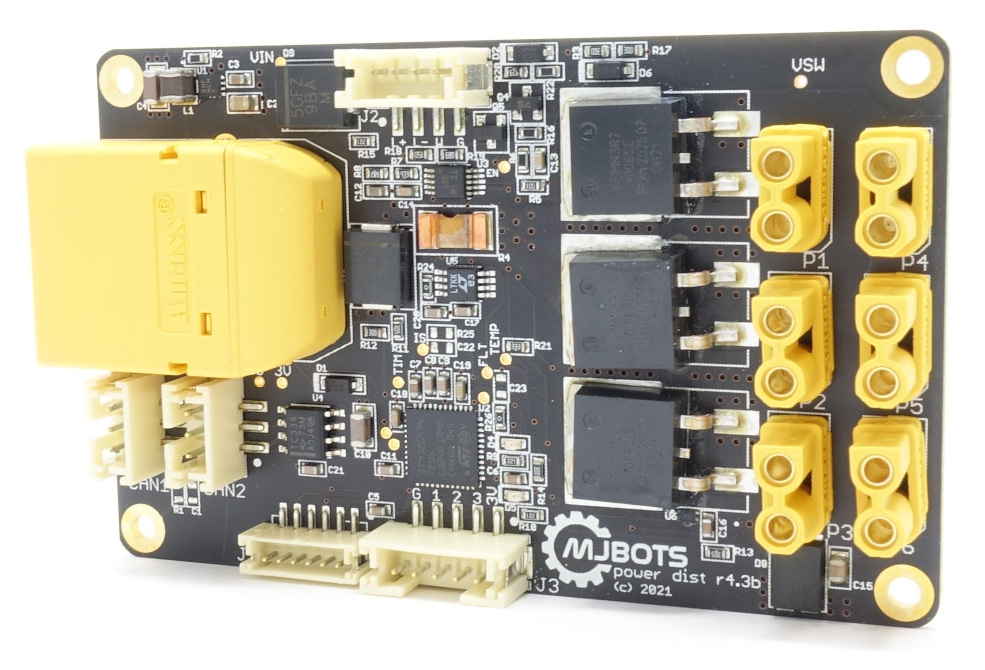
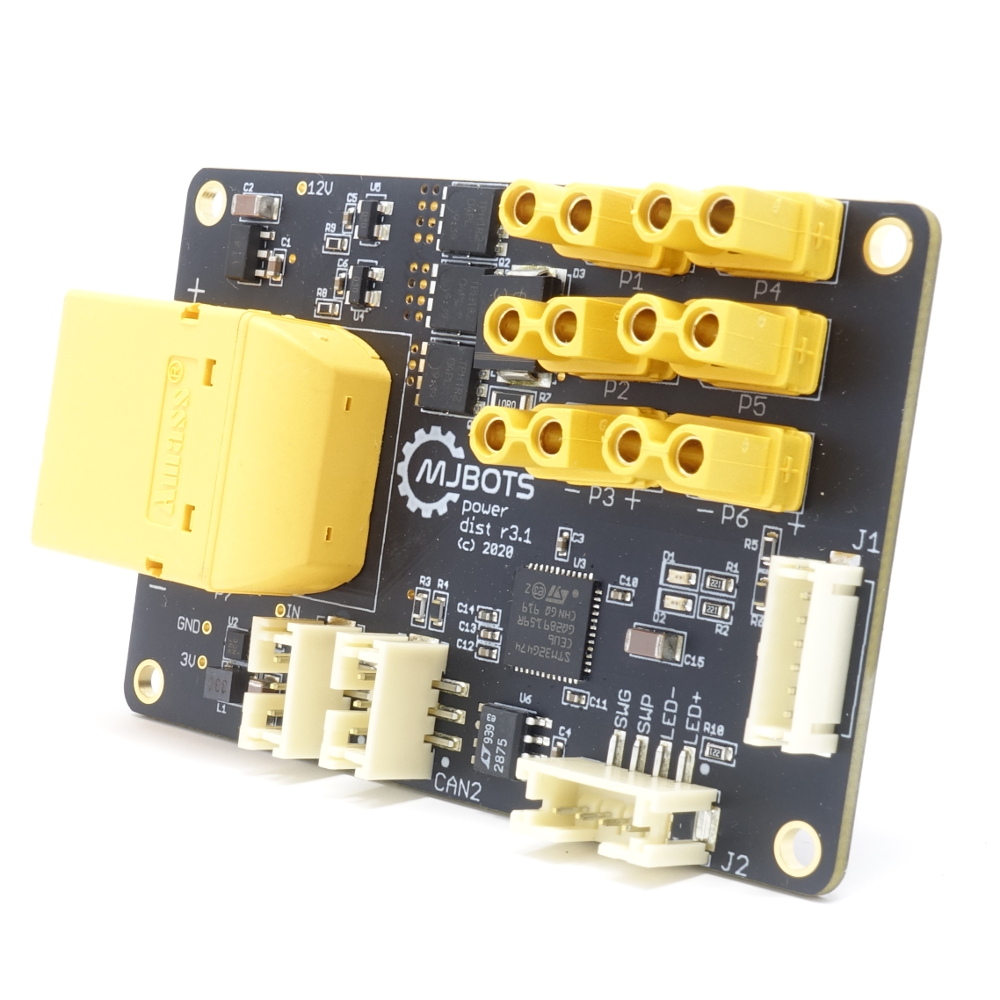
This provides many of the same functions as the power_dist r4.5b:
-
Pre-charge: High capacitance, low-impedance loads up to 4000uF will be safely turned on in a controlled manner.
-
Undervoltage and overcurrent protection: If the instantaneous current exceeds 100A, a soft circuit breaker is engaged.
-
Connector multiplexing: 1x XT90 input feeds 6x XT30 output connectors which are wired in parallel.
-
External switch: An external illuminated switch is supported, with the same connector and pinout as for the power_dist. A switch harness can be purchased separately.