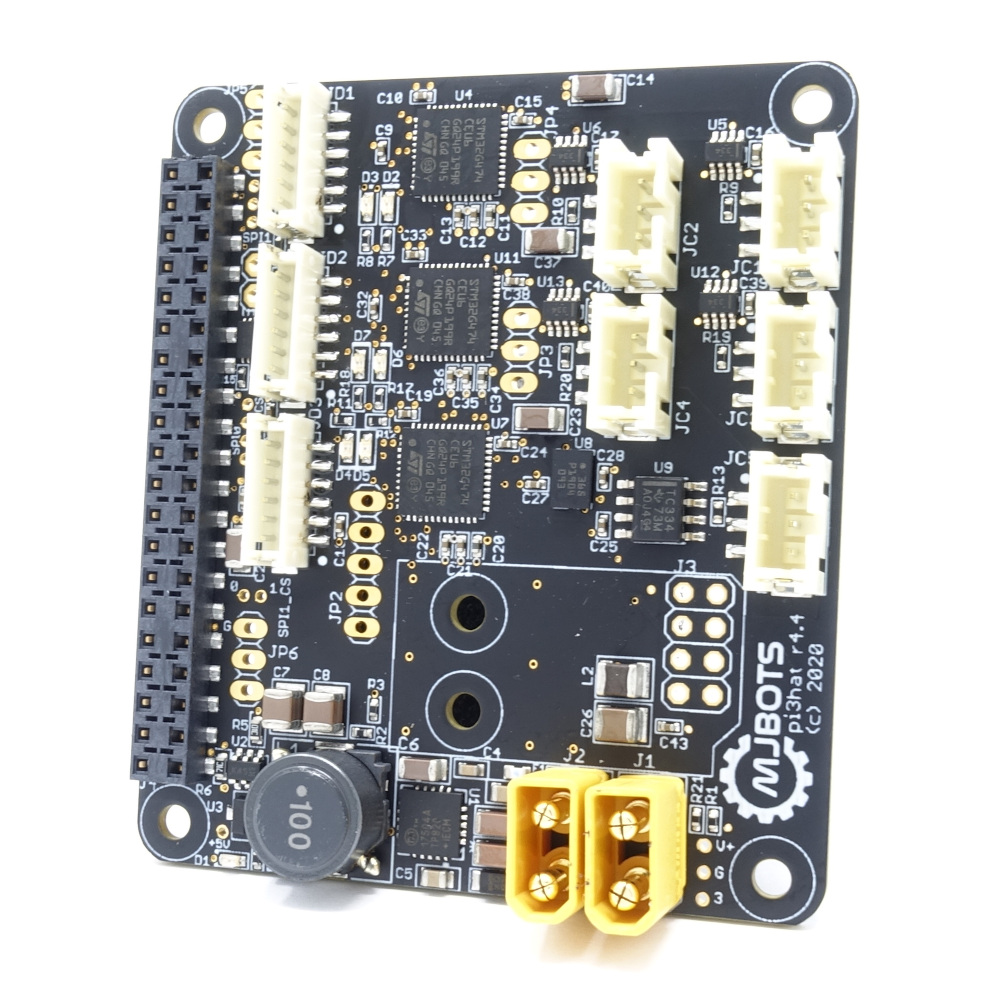
pi3hat r4.4b
In what probably won’t be the last time, mjbots.com now has a new version of the pi3hat due solely to component shortages!

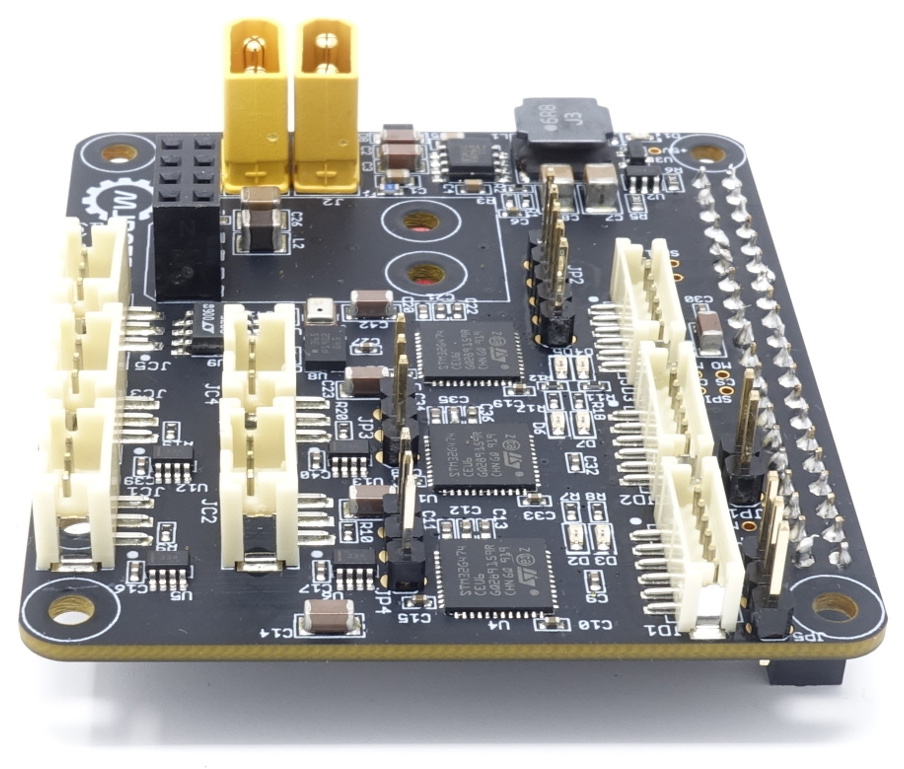
There are no top-level feature changes versus the previous r4.4. What is different is that the connector for the Raspberry Pi has reverted to the fixed height version that the r4.3 and earlier used, and the IMU is slightly better.
Happy building!