Standing up and sitting down
Before SMMB could function in the Mech Warfare event it needed to be able to start and stop unattended. That meant standing up and sitting down on its own. Being that hack that this was, I went for a two pronged approach.
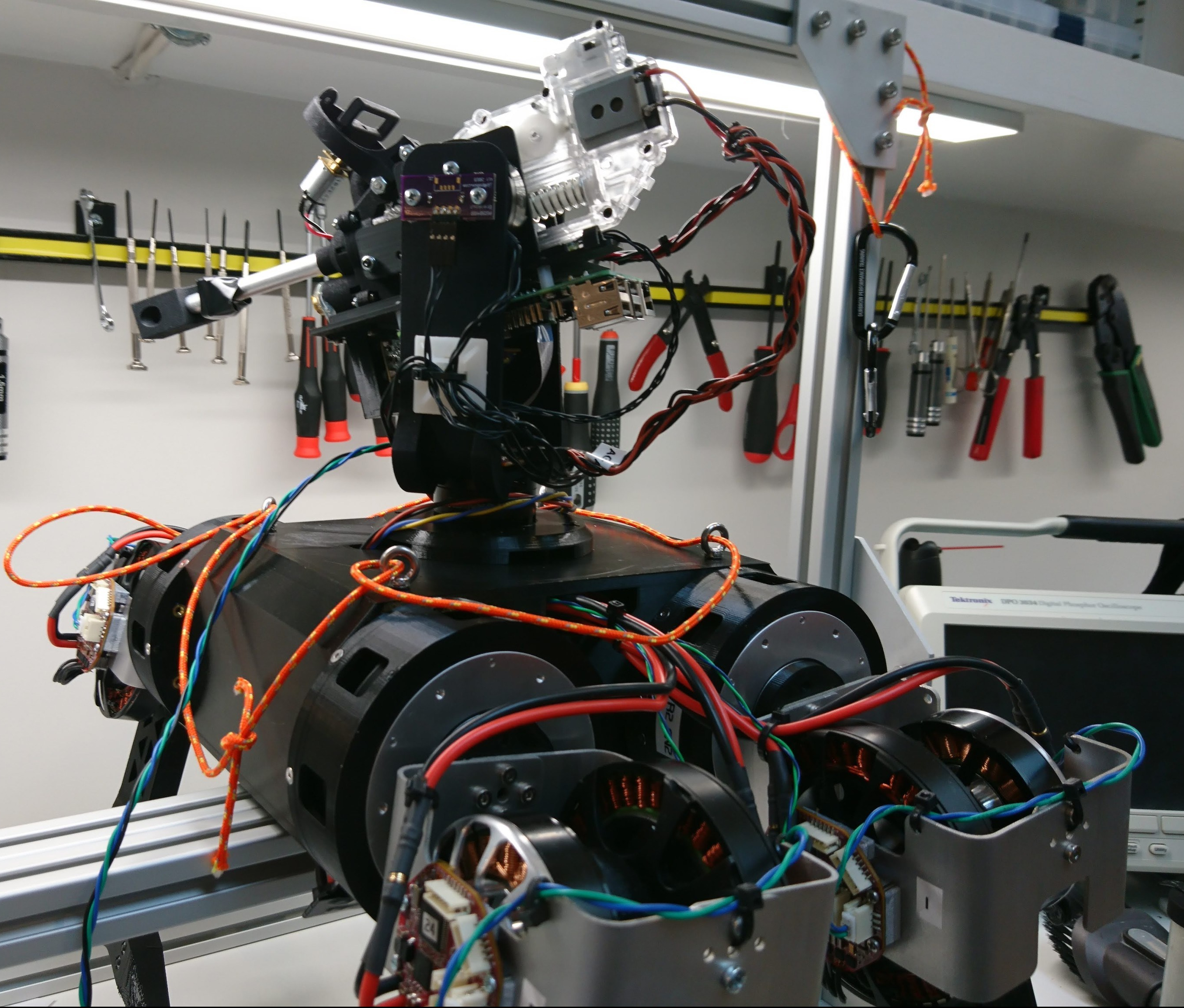
The direct direct servos I have for the upper and lower legs are somewhat underpowered for this size of robot. Especially so when the machine is fully squatting down. Also, the servos aren’t really encapsulated at all, and there are plenty of leg configurations that can self-intersect resulting in robot harm.