More diametric ring magnets at mjbots.com
Following a brief period with no stock, we’ve restocked the original 32mm x 22mm x 4mm diametric ring magnet at mjbots.com. Additionally, there are now 4 new sizes to choose from:
- 44mm x 30mm x 4mm - N35H
- 24mm x 16mm x 3.5mm - N35H
- 21mm x 14mm x 2.5mm - N45H
- 19.5mm x 12mm x 2.5mm - N35H
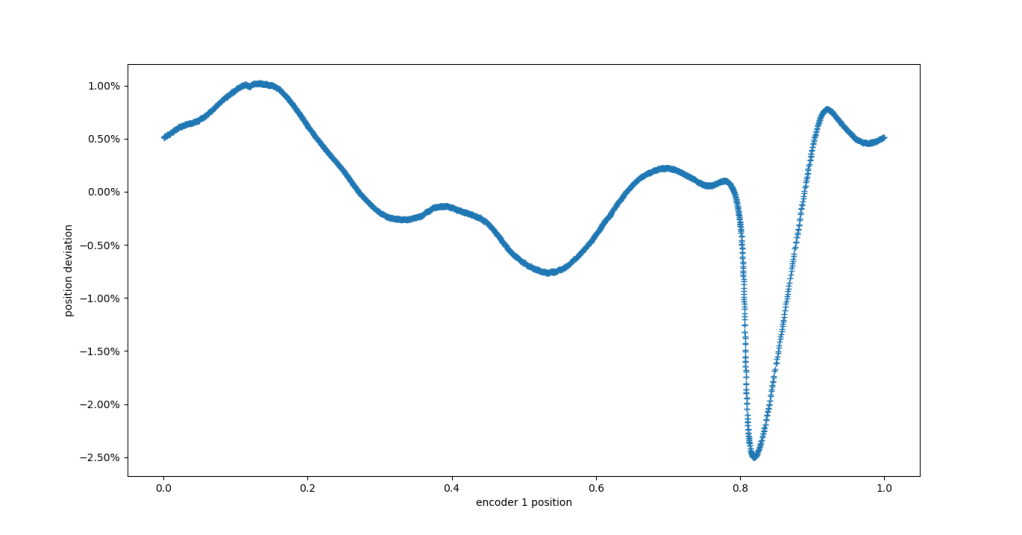
This should hopefully let you use low cost (albeit low accuracy), off axis diametric ring magnets in even more applications. Good luck!