Microscope mount
I’ve been using a relatively inexpensive microscope for SMD soldering work for some time, connected via HDMI to a 24" monitor.
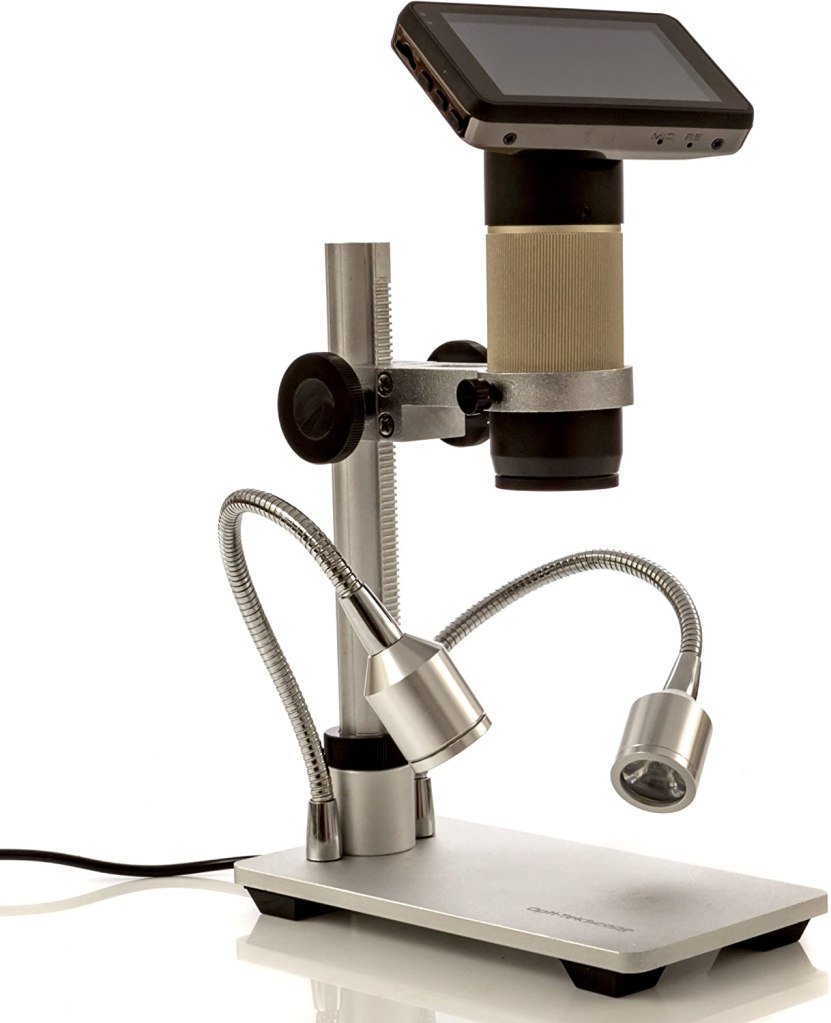
For the price, I’m definitely happy with it, but as I’ve been doing more soldering work, I’ve become less happy with the mounting stand. The arm it mounts to often does not reach far enough to get the optics over the part of the board in question, or the base is too tall or wide to fit under it. If you want to examine something from the side, you have to tip the entire base over. I have resorted to spinning the microscope around and counterbalancing the base with a large weight, which works for some definition of “works” but only improves the reach by a little bit.