Flexible I/O: Auxiliary port configuration
In the last post, I covered the goals behind more flexible I/O support in the moteus brushless controller. This time, I’ll start to cover the configuration model that I implemented to make that support work. It is broken up into 3 distinct phases, auxiliary ports, sources, and sinks.
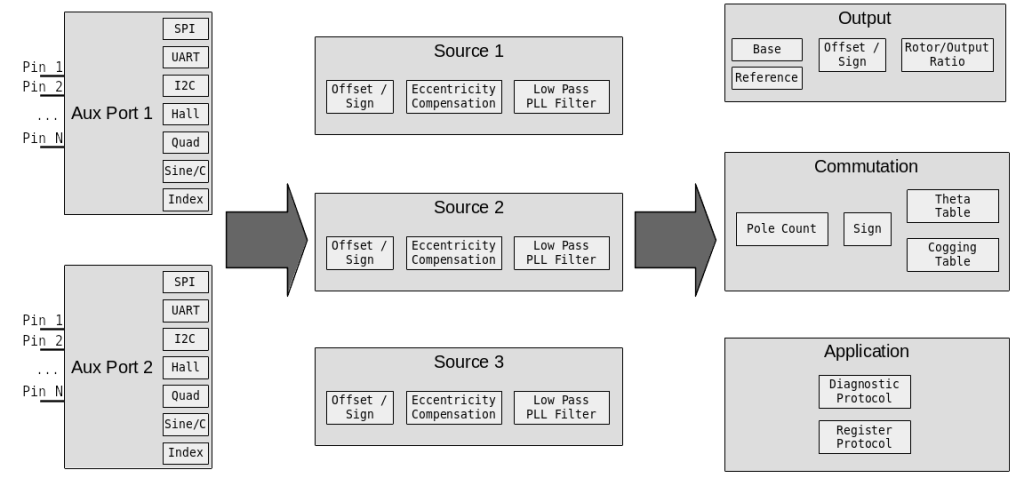
Slightly simplified I/O structure flow diagram
Auxiliary port pin configuration
To begin with, the available connectors and external pins on moteus are organized into “auxiliary ports”. For the moteus r4.3/4.5/4.8/4.11, the correspondence is that the external primary encoder connector, if present (r4.8 and newer), is “auxiliary port 1”. The ABS port and some on-board debug pads are “auxiliary port 2”. For each port, there are two levels of configuration, at the pin level and the function level.