UART tunneling with moteus
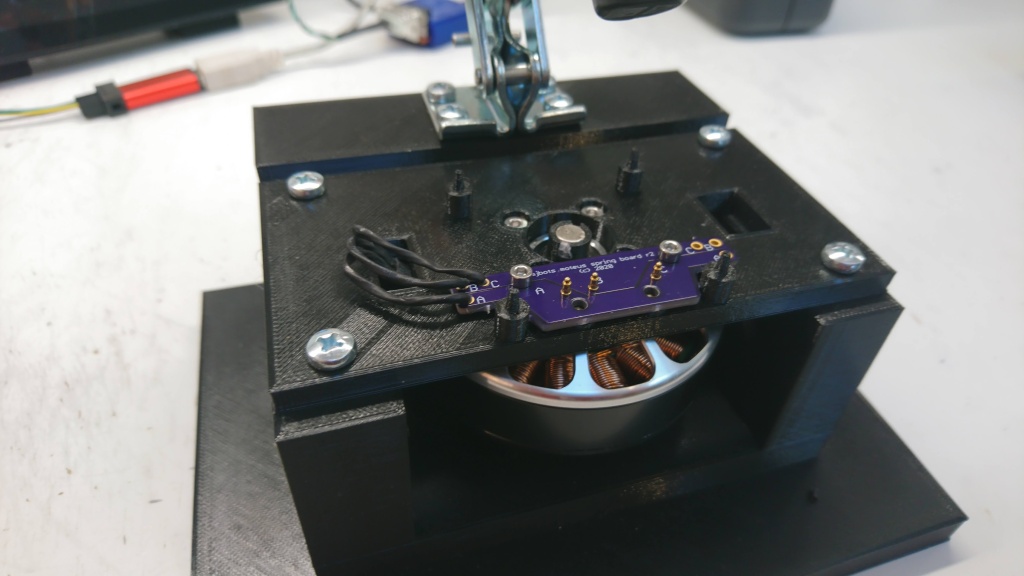
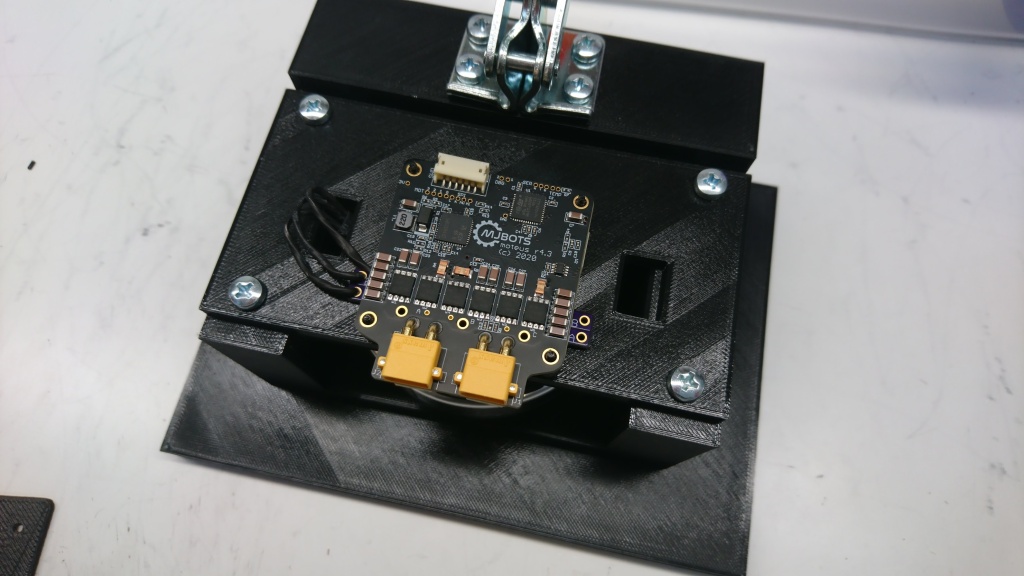
With the release of more flexible I/O support, the moteus controller auxiliary port can be used to monitor encoders using an onboard UART. Now, with firmware release 2023-02-01, those UART pins can be used as an arbitrary logic level serial port controlled by the application! Let’s see how to use it below.
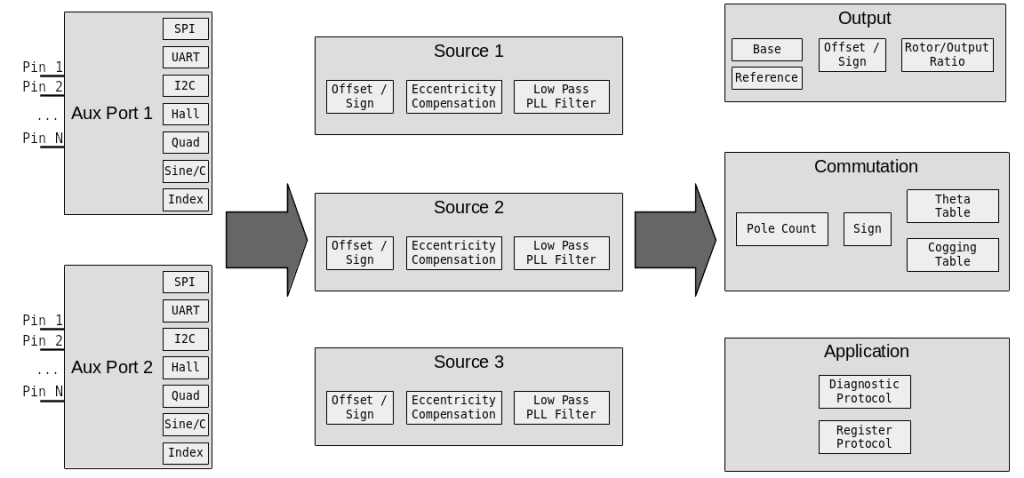
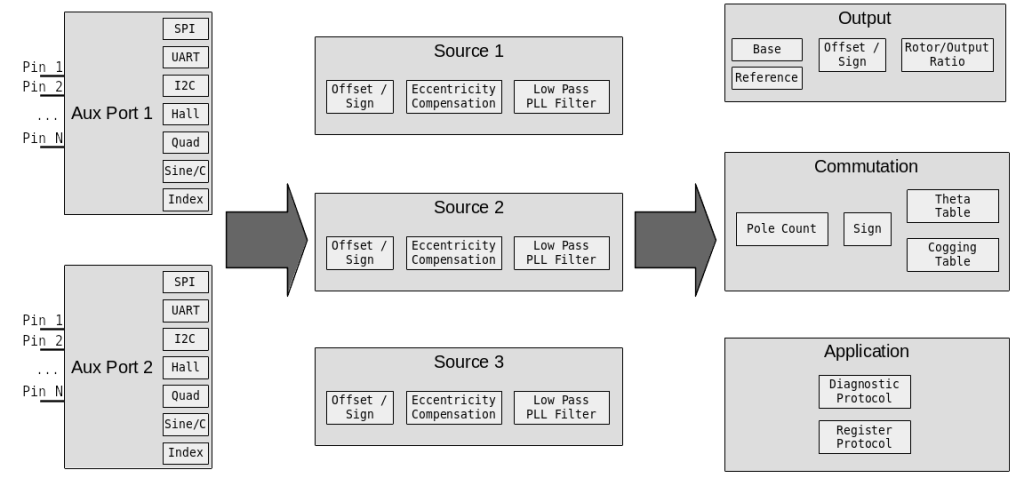
First, you will need to look at the pin configuration table to find pins that support UART functionality, and configure them as UART in the “aux?.pins” configuration tree. Next, “aux?.uart.mode” should be set to “kTunnel”, along with the desired baud rate. That’s it on the configuration front.