Some time ago I wrote about using the wcubed vise for the Pocket NC. While I don’t end up using it very often any more, mostly because I rarely work with rectangular stock, it can be useful from time to time. Unfortunately, it is no longer manufactured. In case anyone is interested in replicating it, I’ve taken at least a minimal stab at modeling it up based on measurements of my unit along with necessary hardware as picked from McMaster. I suspect the model should be good enough to get something that works.
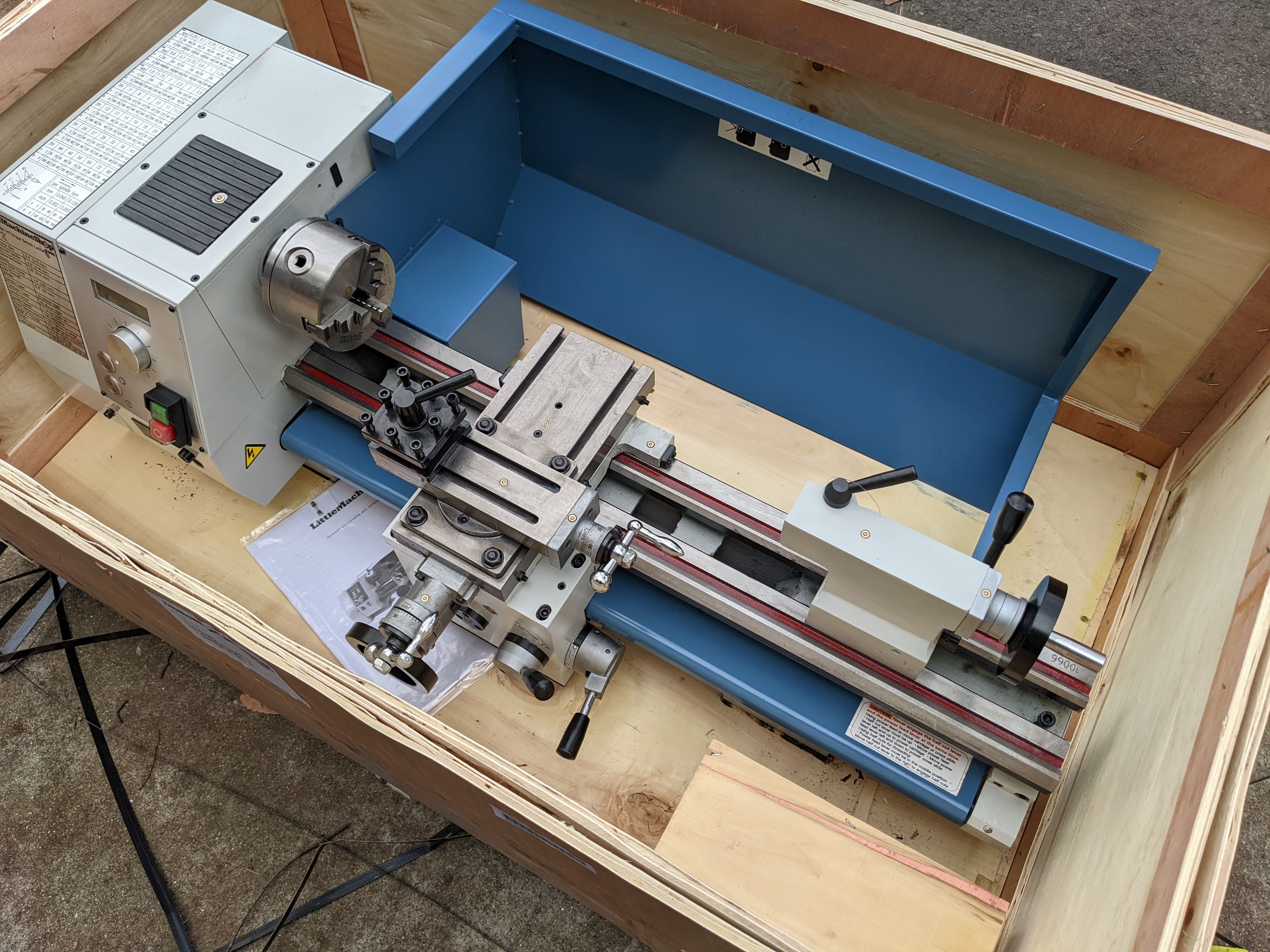
With the Artisan’s Asylum closed for a relocation, I’ve been without access to a manual lathe for a while. Fortunately, import mini-lathes aren’t that hard to come by!
What’s inside?
Well, look at that!
This is a Sieg C4 derivative from Little Machine Shop, which was about the largest machine I could reasonably move into my basement.
All set up
It isn’t as rigid as the Colchester at AA was, but it does have power feed and power cross feed which both work just fine. I’ve run into a few minor quality issues, and the spindle runout isn’t great, but it should do for my needs.
To use the moteus brushless controller with a motor, you first have to calibrate it with moteus_tool (for history, see “Encoder autocalibration” and “Auto-tuning current control loops”). This calibration process is primarily used to measure the mapping between electrical phases and the encoder, but as a secondary parameters also measures the winding resistance and Kv of the motor and determines the parameters necessary to set the current control bandwidth.
Motivation
To date, this process can be used with any motor, but making it work can involve fiddling with a number of inscrutably named command line parameters to moteus_tool. --cal-power, --cal-voltage, and --cal-speed are all there, however they don’t really do what you think based on their name, but it is necessary to adjust them to make many motors work.
This is a series, check out the previous posts at part 1, part 2, or part 3. This time, I’m going to make this probe hopefully do something.
I started out just verifying that the Pocket NC would treat the vers.by probe the same as the built in tool setter probe. So I ran a tool measure cycle, and then just tweaked the probe by hand. Woohoo! It stopped the cycle just like normal. Actually measuring a tool worked too if the probe wasn’t activated, or if it wasn’t plugged in. Success.
In part 1 and part 2, I covered my motivation and the mechanical hardware behind a touch probe add-on for my Pocket NC V2-50. In this post, I’ll cover my prototype electrical hardware.
My intention with the probe was to connect it logically “in parallel” with the existing tool setter probe that the Pocket NC has. I figured that would be likely easiest to integrate with the Linux CNC scripts when I got to the software point. The existing tool setter probe is located in the rotating B axis. That is connected to the Y axis via a single CAT5-ish cable, so my hope was that I could devise something which would pass through the necessary signals on that cable while also paralleling in the new touch probe.
Last time in part 1, I talked about why I wanted to add a touch probe to my Pocket NC. This time, I’ll cover the basic hardware necessary to make it happen.
I decided to start with an inexpensive probe so that as I was figuring things out, I wouldn’t be too sad if I smashed it a few times. I’ve seen a number of other hobby machinists use the “vers.by” probes, so I decided to give them a try too.
When machining, you need to accurately position the cutting tool with respect to the workpiece. With the stock Pocket NC, there are two methods for doing so. The first is to rigidly locate the workpiece with respect to the B axis reference point using a fixture. The second, is to do manual touch offs. Nearly all of my work so far has relied on the former method, as using a manually touch off on a machine without manual controls isn’t all that precise or pleasant. And while possible, it is tedious to touch off against features more complicated than a single edge.
My Pocket NC v2-50 is a fine machine for its size class, but there are still plenty of annoyances. One of them is that chips can accumulate places they shouldn’t, either during a run, or over the long term.
There is a cavity near the back of the machine where the Y axis cables and cable guide retract into. That cavity is exposed to chips flying around, so they tend to accumulate there. There is a hole in the bottom of the machine where the chips could maybe fall out, except the hole is too small for any but the smallest of chips, and further, it is completely sealed off when mounted in the stock Pocket NC enclosure.
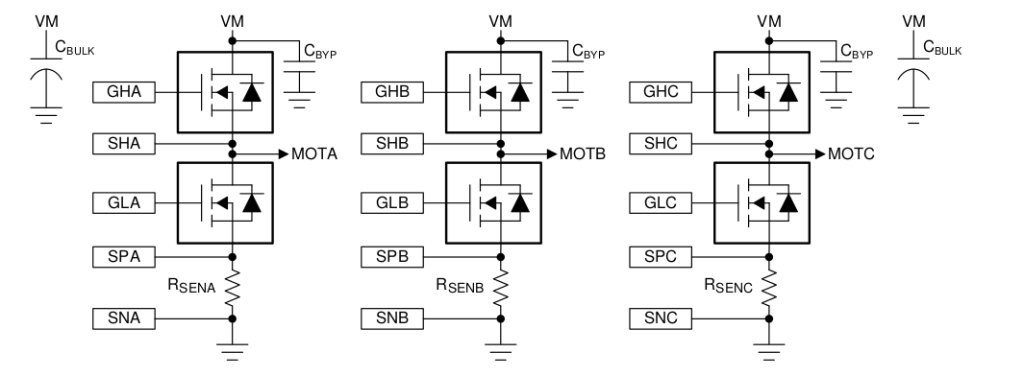
A motor driver like moteus switches power to the phases of a brushless motor using a set of 6 (or possibly more), MOSFETs. The typical topology involves 3 high side N channel MOSFETs and 3 low side N channel MOSFETs arranged in 3 half bridges like this:
(example 3 half-bridge from DRV8353 reference manual)
Since the gates of these FETs need to be driven with potentially high voltages, and you never want the high side and low side to be on at the same time, typically a gate driver is used. For the moteus r4.5 and earlier controllers, the DRV8323 driver from Texas Instruments is what performs this function. This driver lets you configure the drive current for each of the gates for both operations, charging up the gate and discharging it. For high power drive systems, charging up or discharging the gate too fast can result in undesired transients like accidentally switching the other FET on due to capacitive coupling, or inductive ringing as the current starts moving through the FET instead of the body diode. If the gate charges too slowly, then the FET spends much of its time not fully on, which increases power dissipation in the FETs.