First quadruped jump!
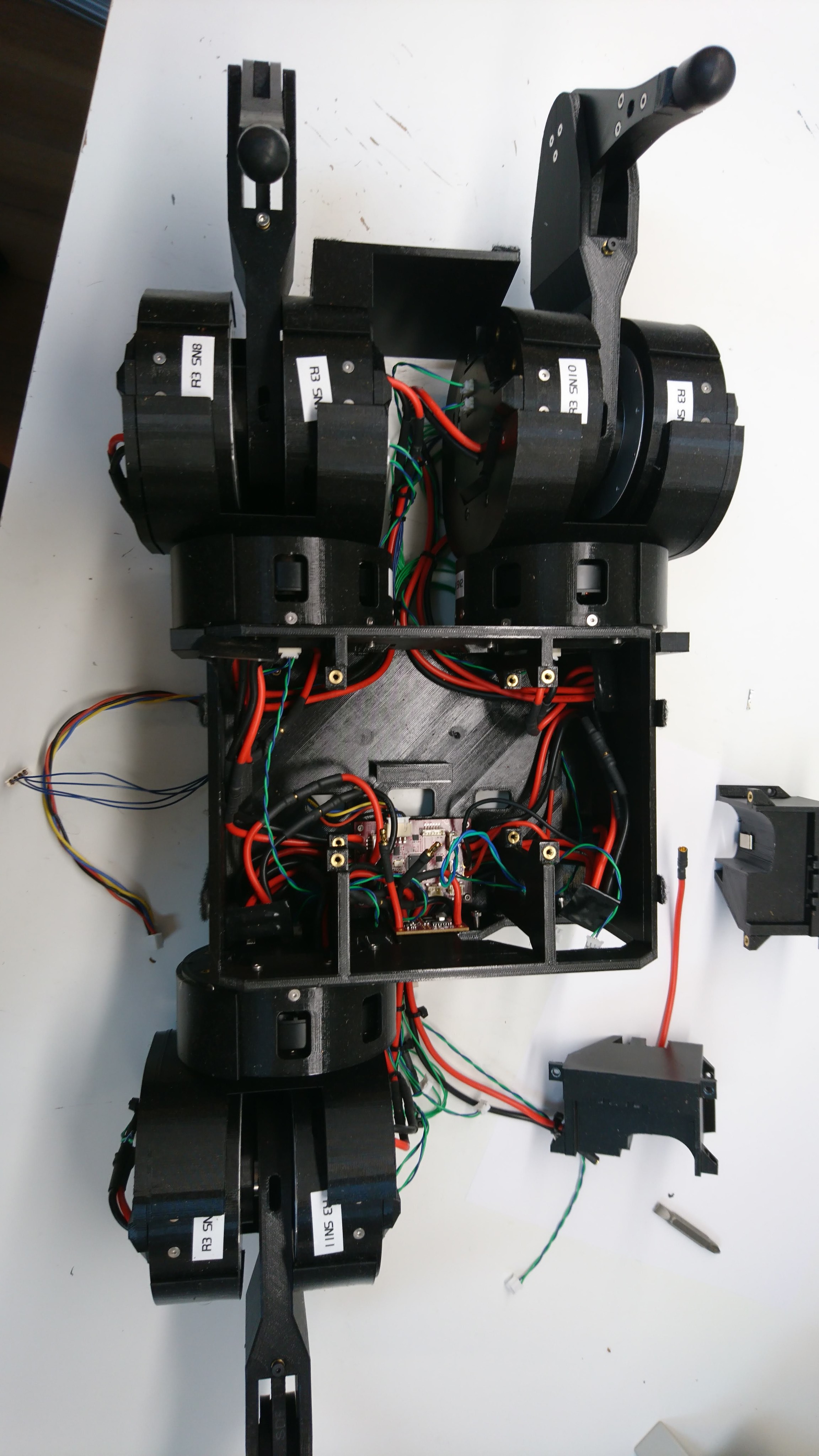
To demonstrate the dynamic capability of the full rotation quadruped, I figured I would start by doing some full machine jump tests to a relatively low height, just to show that it was capable.
Thus, I rigged up an open loop script which squatted a small fraction of the available distance, and then powered up at a relatively small fraction of the available maximum speed. I don’t have the telemetry yet to extrapolate how high this will be able to go at maximum, but I think it should be a fair amount higher. For now, I want to do some more instrumentation and walking testing (and have more spares) before I manage to break things by jumping really high.