MA600 / MA732 breakout board
In the previous post, I outlined a possible path to low cost off-axis encoders to be used with the moteus line of brushless controllers. The first step I took was to try and build a minimally sized breakout board that could be used with the MA732/MA702/MA600 line of hall effect angle sensors. You can get these off the shelf, for instance from tinymovr, but I wanted to see if I could make something a bit more compact, and that had the chip close to a board edge so that it could be used for off axis applications.
Here’s a photo of my first attempt, as manufactured by OSHpark. It is not much larger than the chip and two M2.5 bolts to mount it down.
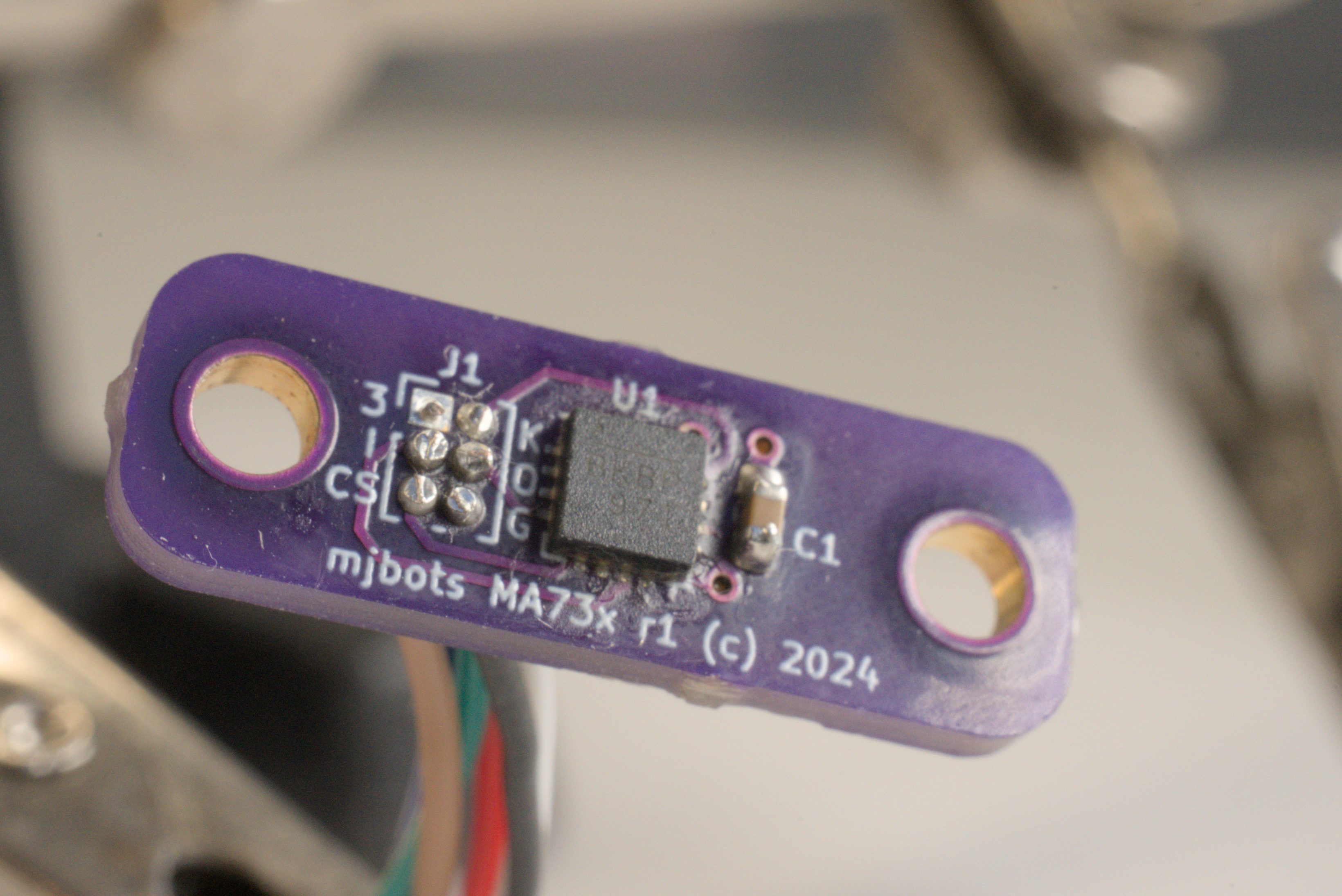
The external connections are through wires soldered to a 0.05" pin header pattern. I thought this would be challenging but doable, but as it turns out soldering to that pin header pattern was more challenging than it made sense to manage. Thus while this board did function, I decided to iterate it to something that would be easier to attach to.
This is a photo of my second attempt. This one has a footprint on the back that can support either a vertical or right angle JST GH-6 connector. Sadly, the vertical variant of that connector has a reversed pinout from the right angle variant, so they aren’t perfectly interchangeable.
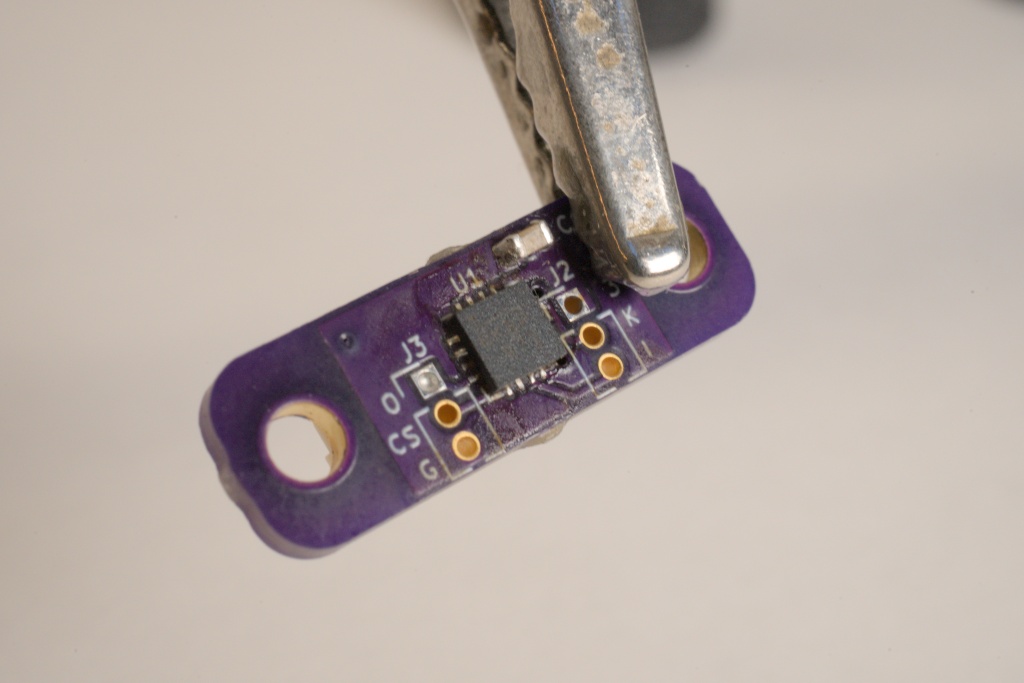
The only real downside to this variant is that in the right angle configuration the cable needs to exit away from the magnet. However, the decoupling capacitor is on the side of the board close to the magnet, which will slightly distort the magnetic field. In practice for the MA732, this doesn’t make a big difference, but for chips that use more precise sensing techniques like the MA600, this could be a problem.
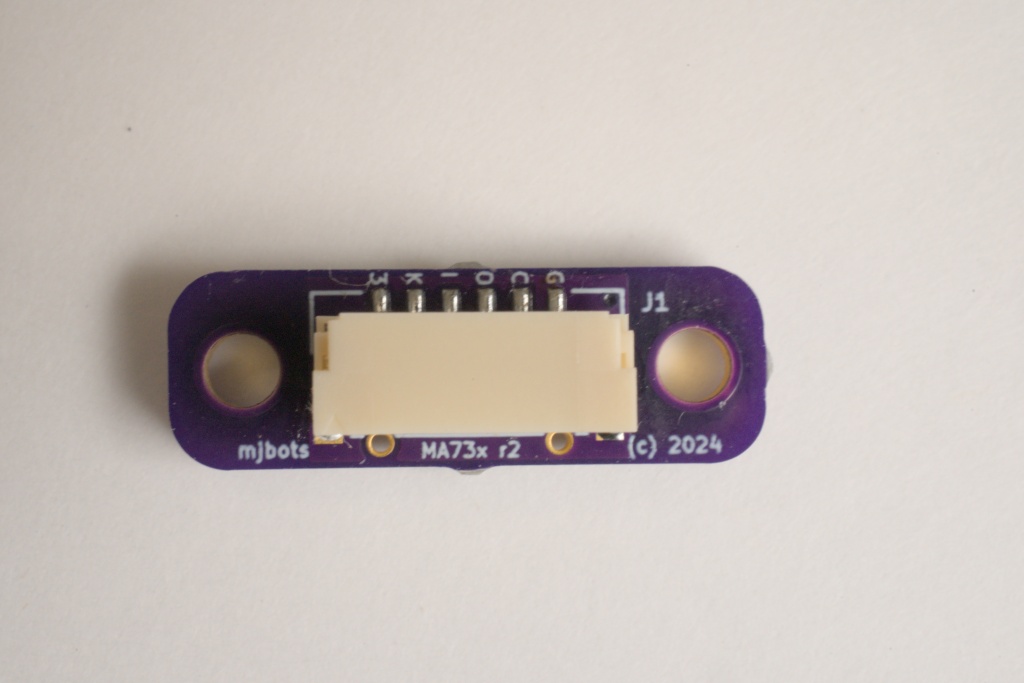
And here is the third version:
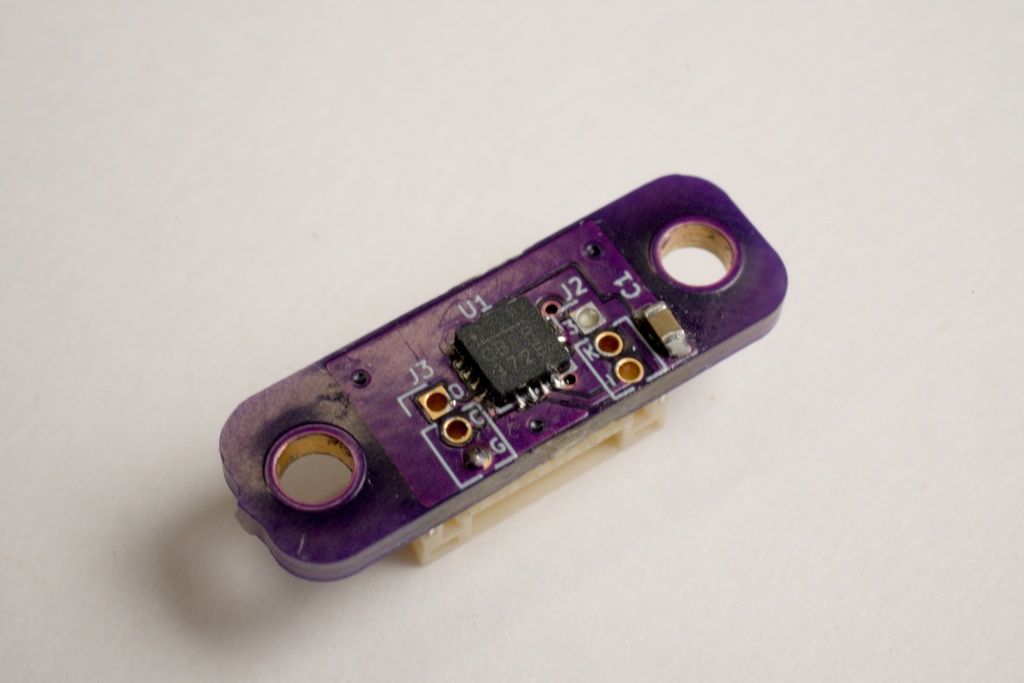

This actually supports the MA600 as well, which has an additional supply pin. It also has the decoupling capacitor moved to be not between the sensor and the magnet. Otherwise, it has the same connectorization capability as the second version.
This the board that became the MA600 breakout on mjbots.com!
In the next post I’ll look at how to get a diametric ring magnet installed on a motor so that we can use this!