pi3hat r4.5
I’m excited to announce a minor upgrade to the mjbots pi3hat product line, the pi3hat r4.5!
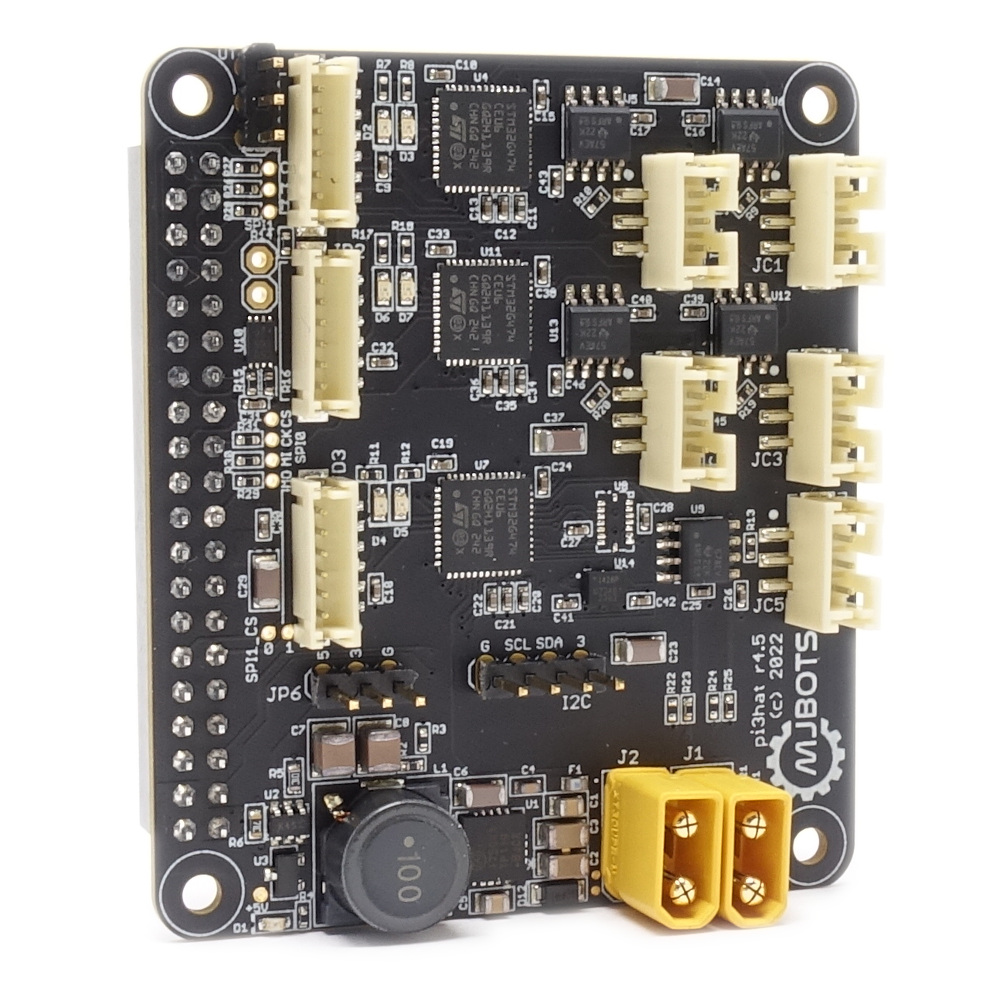
This has a few upgrades over the old r4.4b:
-
The input voltage range is expanded from 8-44V to 8-54V.
-
All CAN-FD ports have +-58V bus fault protection, up from +-12V.
-
0.1" pin headers are present for the Raspberry Pi I2C, UART, and for 3.3V and 5V outputs
Check it out at mjbots.com today!