quad A1 day at Killian Court
I took a lot more footage than ended up in the annual update video. Here’s a short with footage from Killian Court on the Charles River:
I took a lot more footage than ended up in the annual update video. Here’s a short with footage from Killian Court on the Charles River:
Here’s the approximately annual giant video update:
If you’re interested in any of the topics in more detail, I’ve collected links to individual posts for each of the referenced items below.
Thanks for all your support in the last year!
Announcement of moteus r4.3: Production moteus controllers are here!
Meet the newest revision of the moteus controller!
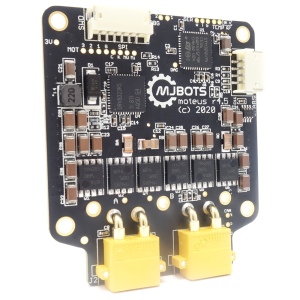
Yes, it does look mostly the same as the r4.3 that has been getting a lot of use lately. This revision exists mostly to improve manufacturability, but I snuck in a minor design improvement while at it. Now, the maximum voltage input is rated up to 44V from the 34V of the r4.3! (Note though, that the pi3hat and power_dist still are limited to 34V). Otherwise the new controller is fully electrically, mechanically, and software compatible with the r4.3.
In two previous posts (part 1, part 2) I discussed some changes I made to the gait sequencing on the quad A1. Things are working relatively well now, sufficient that I was able to take this compilation video in one sitting without any gait or mechanical failures! I actually took a lot of the outdoor shots from this video in the same session, so things are definitely getting more robust.
This summer I had to send my Pocket NC in for some service, when it came back, I immediately noticed that the X axis homing was very far off, something like 0.01 inches, as I was boring a hole in one side of a part, spinning it around the B axis, then boring a countersink in the other side. The two were very clearly not concentric. I suspect the homing mechanism shifted in transport or something, because the error was very consistent.
It’s only October, but the weather is what it is and robots will do what they do!
While testing the improved gait sequencing for the quad A1 I got some footage of it traversing a few different types of outdoor semi-rugged terrain.
The first clip shows it walking over some tree roots. In this particular instance, it just uses a high stepping gait, which allows the feet to get on top of the root. The gait sequencing doesn’t handle walking over the taller part of the root very well yet… the robot can get “high centered” on two legs, with the other two flailing in the air.
To stay on top of bazel development, and to prepare for some future improvements, I’ve gone ahead and upgraded the moteus firmware build system, rules_mbed to use the new bazel “platforms” toolchain resolution mechanism.
Previously, rules_mbed used the “crosstool_top” bazel mechanism for toolchain configuration. This allowed a single package to contribute a set of C++ toolchains which would be selected based on CPU and compiler. One of the downsides from the rules_mbed perspective, is that it made it difficult to make a build that included both mbed targets and host targets (or anything else non-mbed). rules_mbed worked around this by including a functioning clang host toolchain within it.
Now that the quad A1 has been running faster, it has started “running” through its ad-hoc cable management too. After replacing a harness for the nth time, I decided to actually design something rather than just keep re-building over and over again.
My current best effort uses semi-flexible nylon split conduit, captured in 3d printed forms at each joint. Inside that conduit is basically the same harness I had before, with the cables selected to be more robust to repetitive motion. The nylon conduit is only semi-flexible, so it enforces a relatively large minimum bending radius on the wires within, while still sticking to the black quad A1 color motif.
As part of some experimentation in native Windows tools for moteus, I’ve created a dirt simple rules_wix repository in github. It provides a minimal wrapper around the WiX Toolset for creating Window’s installers from within bazel. There’s nothing fancy there yet, but it can at least make an installer with a single executable in it!