nrfusb
In order to bring up the final piece of the raspberry pi 3 hat, the nrf24l01+, I wanted a desktop development platform that would allow for system bringup and also be useful as a PC side transmitter. Thus, the nrfusb:
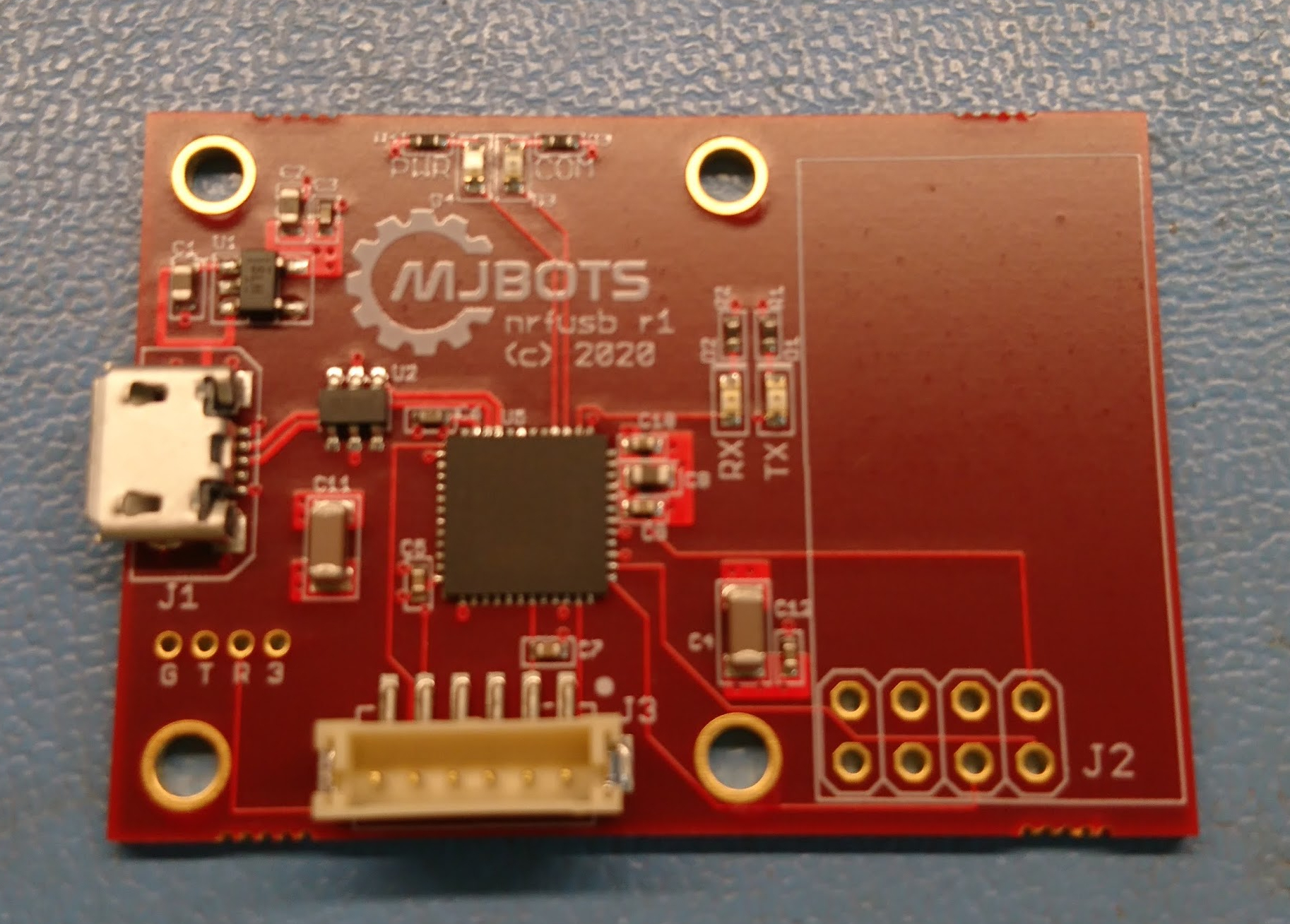
Similar to the fdcanusb, it is just an STM32G474 on the USB bus, although this has a pin header for a common nrf24l01+ form factor daughterboard.
The next steps here are to get this working at all, then implement a spread spectrum bidirectional protocol for control and telemetry.