Mech Warfare 2019 - at Maker Faire Bay Area
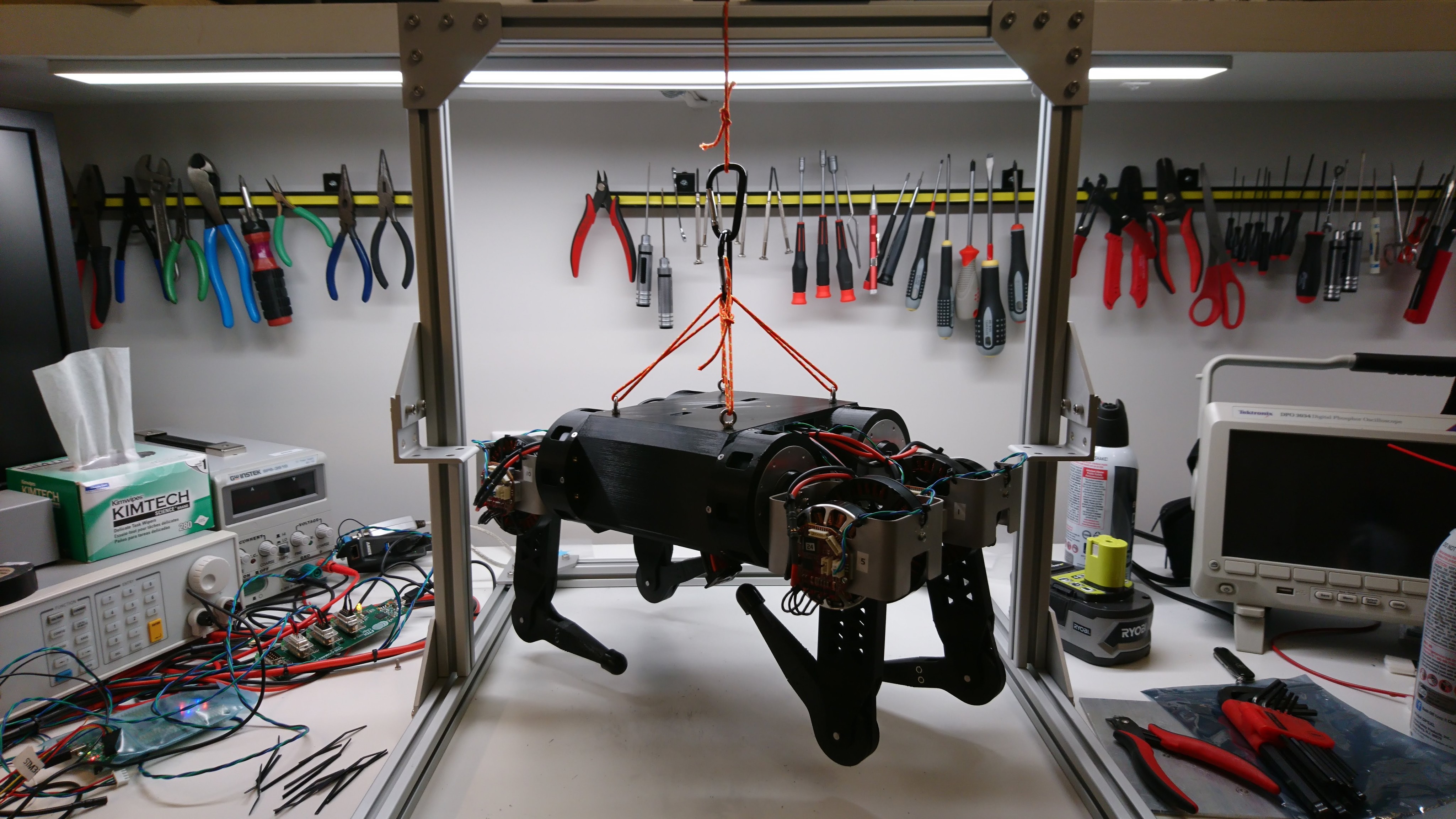
As an intermediate forcing function, I’ve been preparing Super Mega Microbot to enter the Mech Warfare event at Maker Faire Bay Area May 17-19 in San Mateo, CA! The Mech Warfare event is a competition where scale size “mechs” or robots compete with airsoft cannons in a scaled down cityscape. Teleoperation is allowed, but the human operators are only allowed to see “what the mech sees”, which means driving from a video screen.