gimbal control board revision
With the new gearbox based mech chassis for Super Mega Microbot 2, the old gimbal controller would need some updates. It has these new features/capabilities:
- Higher input voltage: The old system ran at 2S, so 7.2V nominal. Now we’re running at 5S, so 18.5V nominal.
- RS485 data: The HerkuleX based robot used TTL level data communications. moteus uses RS485.
- Daisy chained power: With the new raspberry pi based computer in the turret, I now need to have an additional power and data port up on the mobile part of the turret.
- No camera passthrough: Similarly, since the camera is directly attached to the raspberry pi 3, I don’t need to mess with having a connector to pass it through anymore.
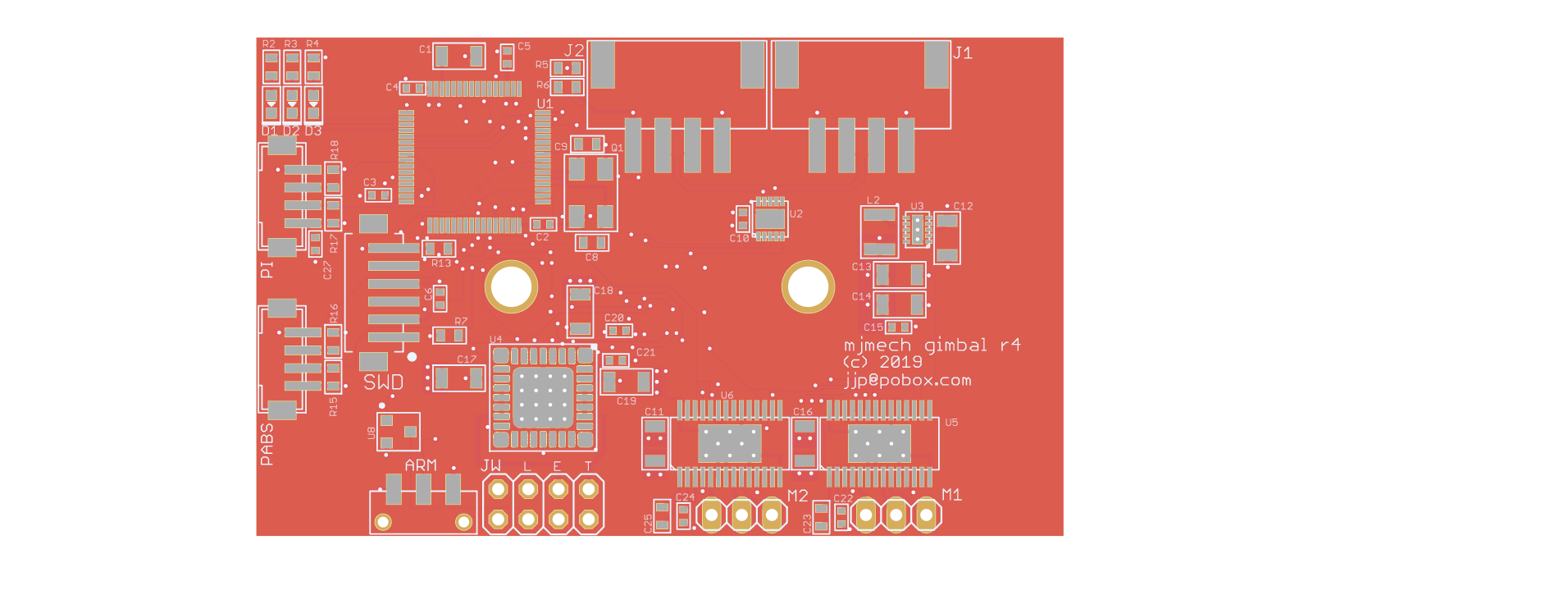
PCB rendering
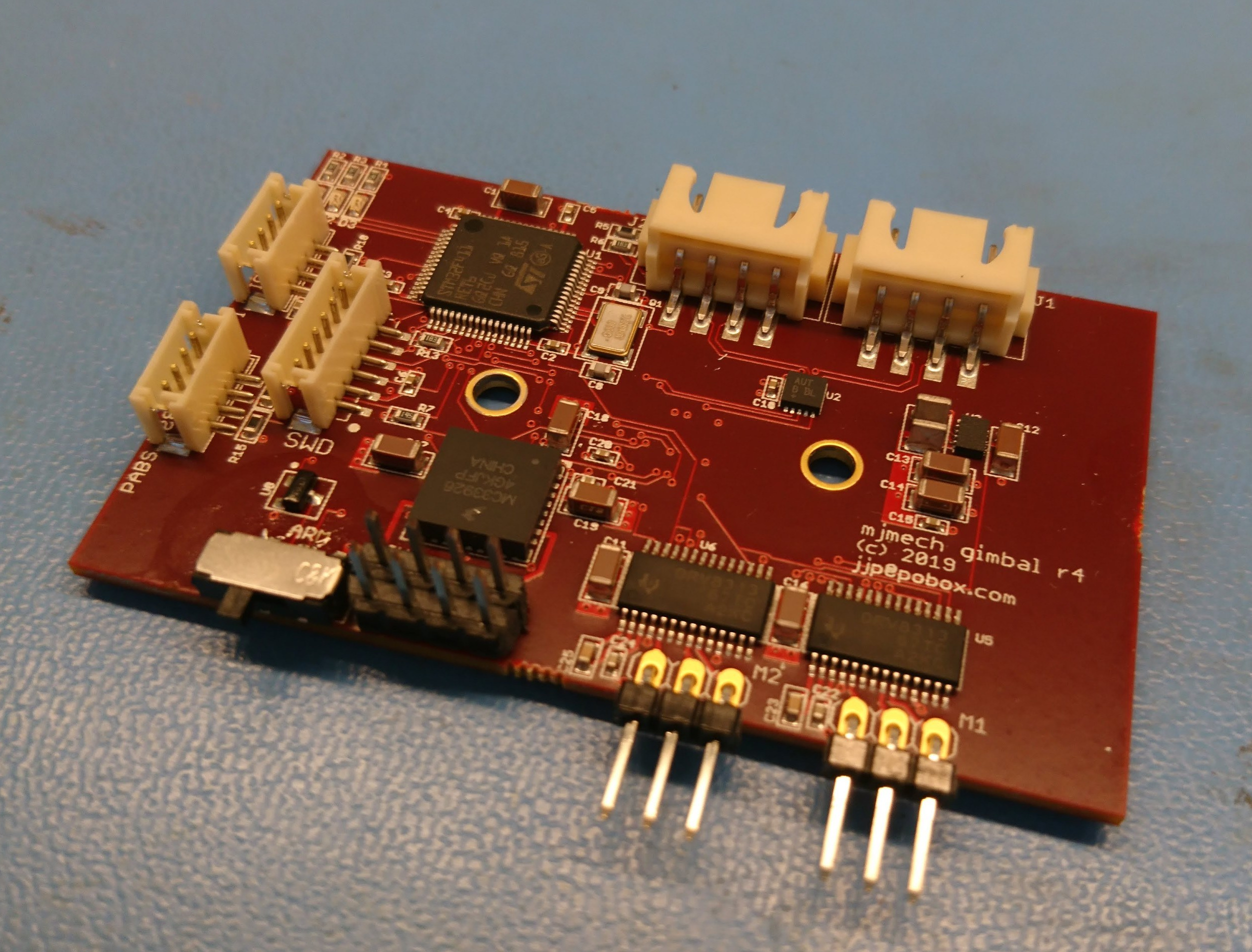
As usual, I sent it off to MacroFab and waited. A seemingly very short time later and poof, here it was!
Bringing this up was more annoying than it could have been, mostly from a software perspective. The moteus and imu junction firmware were both based on the original gimbal software, but refactored to be usable across different projects. At the same time, that was where I had developed the RS485 based multiplex transport library. So, now was the time to bite the bullet and convert the gimbal software to use those common libraries.
Since the gimbal board has another unique processor compared to everything else, I broke it out into a separate git repository:
The old project was initially CubeMX based. When porting to rules_mbed and moteus/mjlib, I was in a hurry, so just copy and pasted much of the CubeMX initialization into the new tree and didn’t use any mbed APIs at all. It took me a while to remember how all the CubeMX initialization was glued together and which pieces of it were relevant before all the peripherals started working properly.
I then proceeded to mechanically integrate it together into the unused turret.

Mounted in bottom of turret
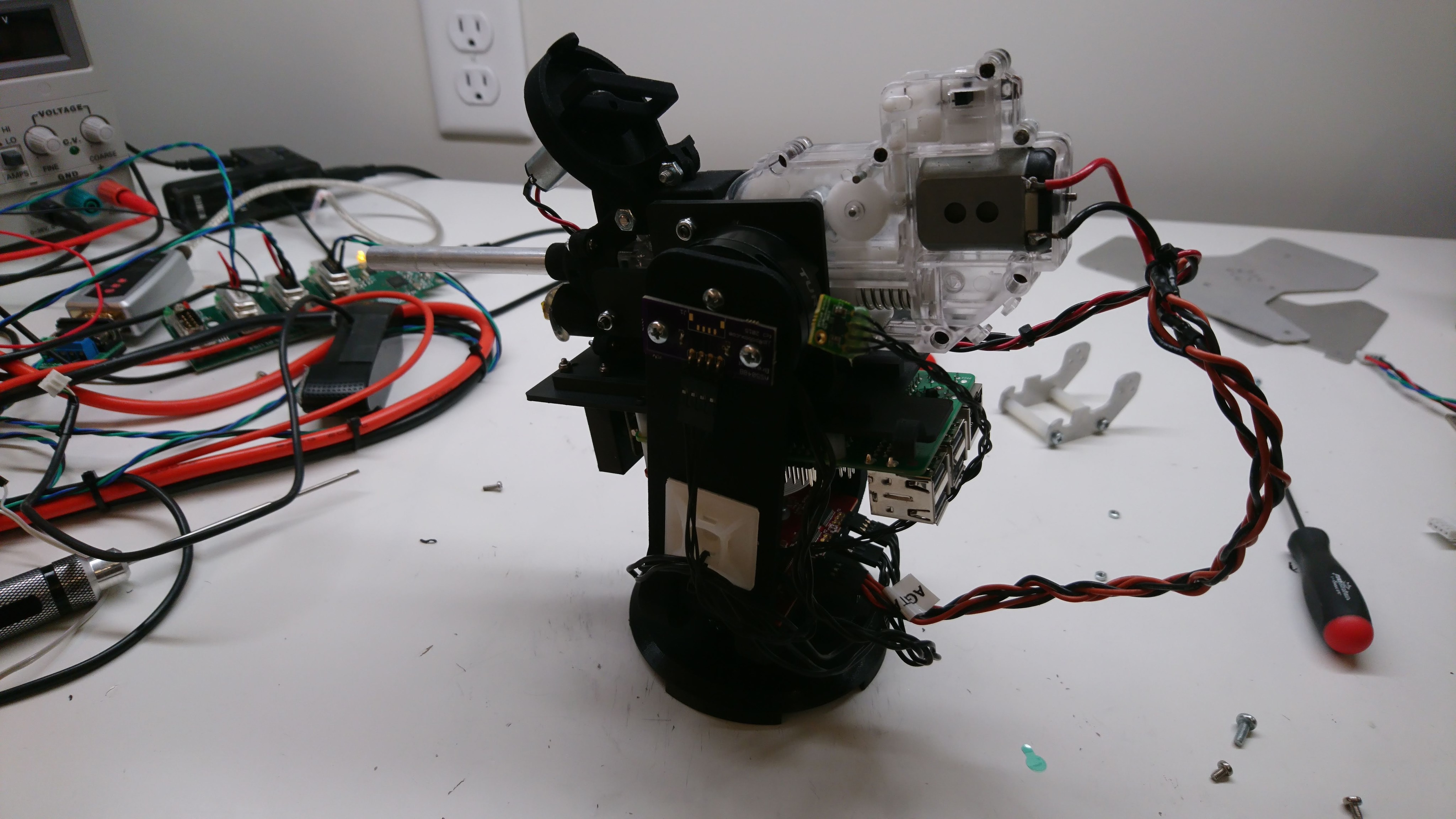
Fully assembled turret
I once again had to remember how to calibrate and operate the thing. Doing this once every 9 months is kind of painful! However, I did manage to get it all working again, and ready to be integrated onto the mech.