moteus RS485 bootloader
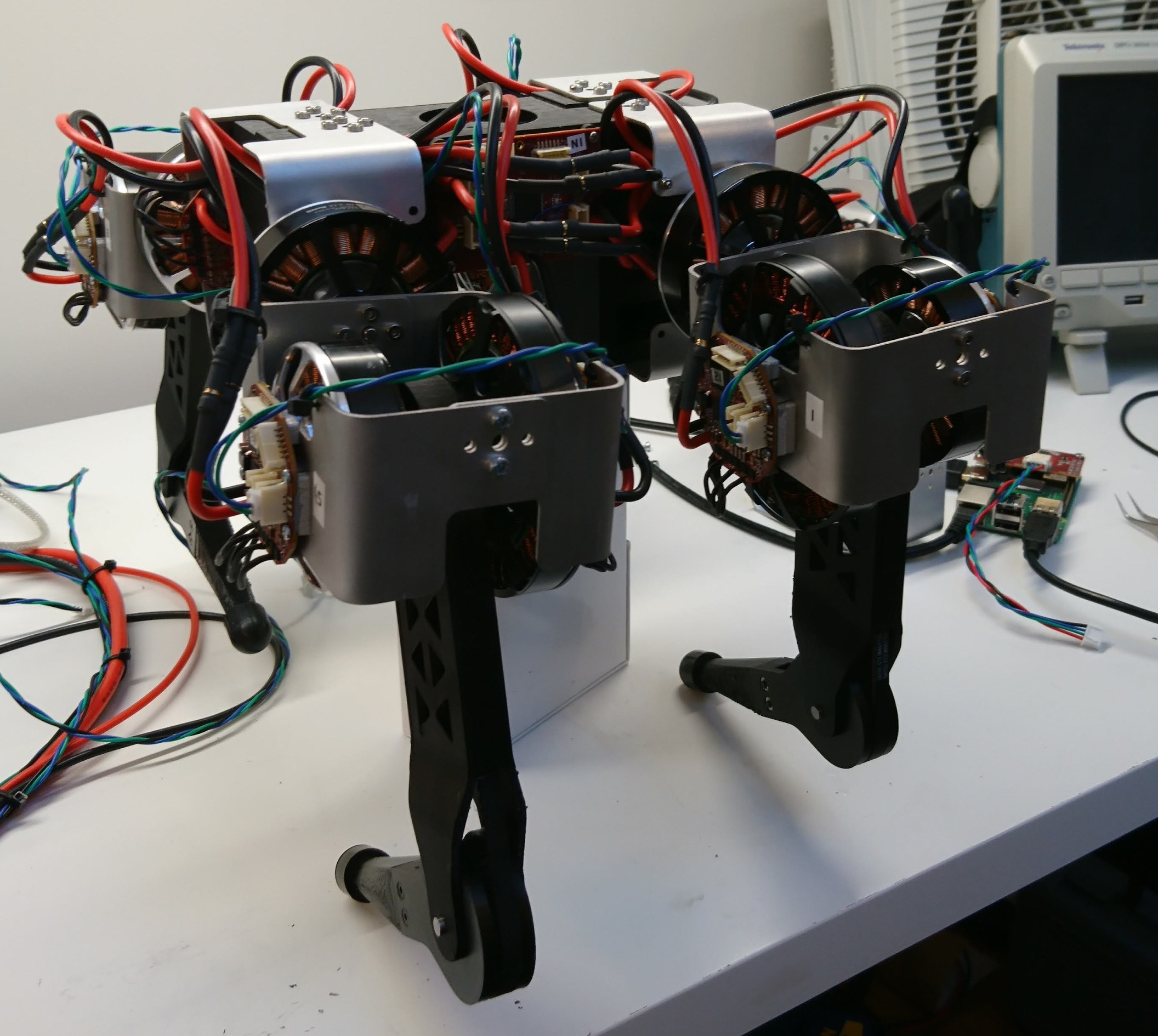
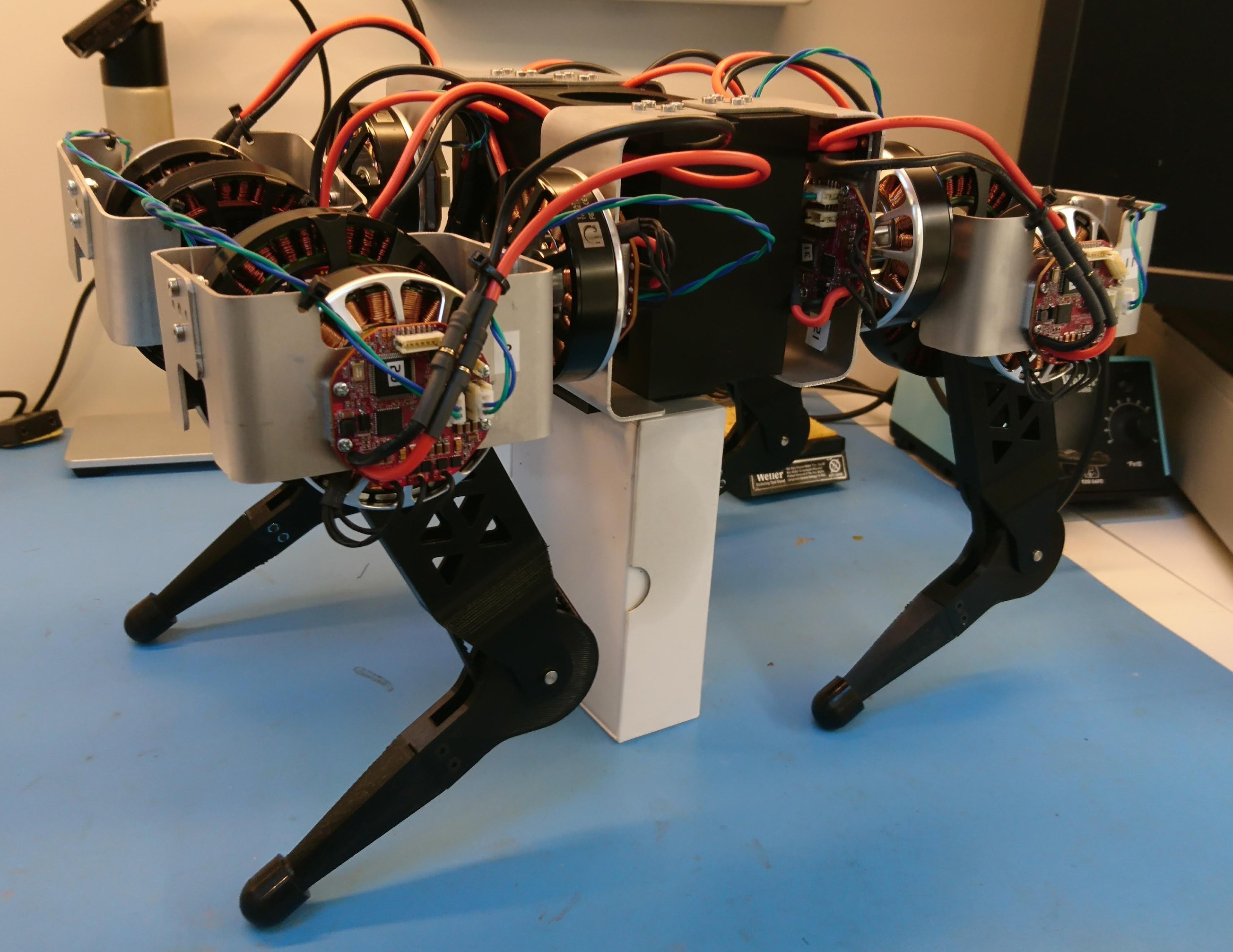
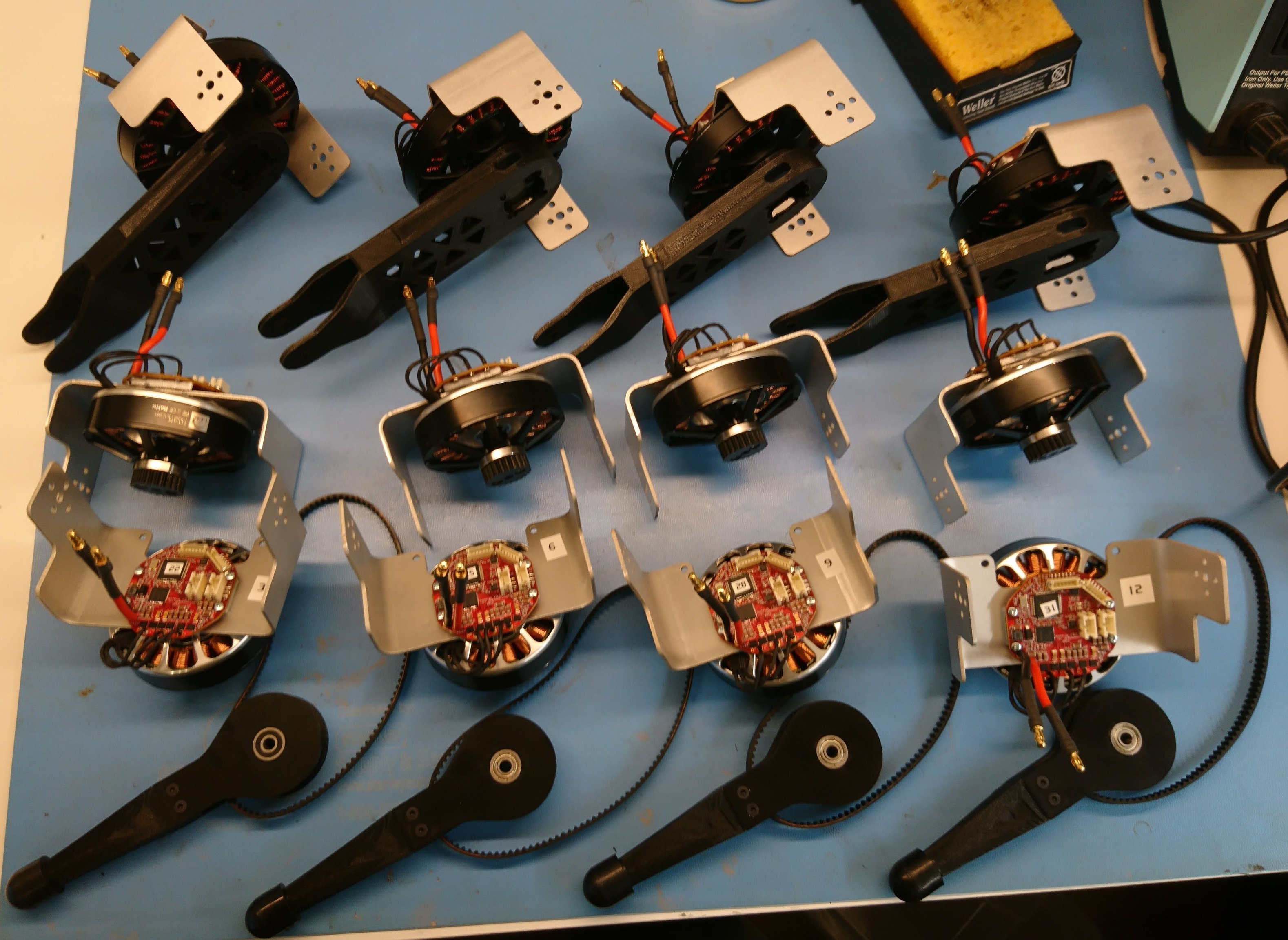
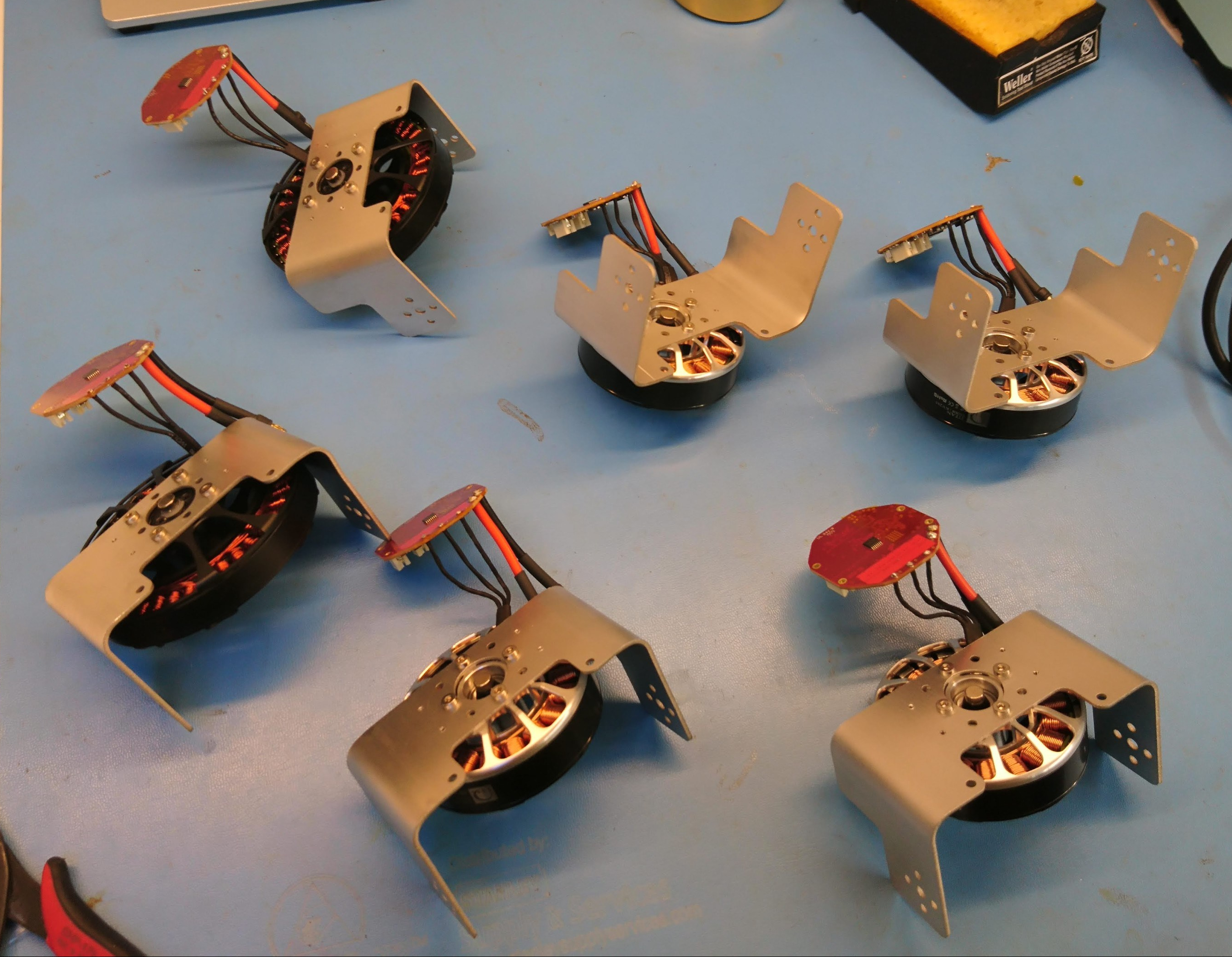
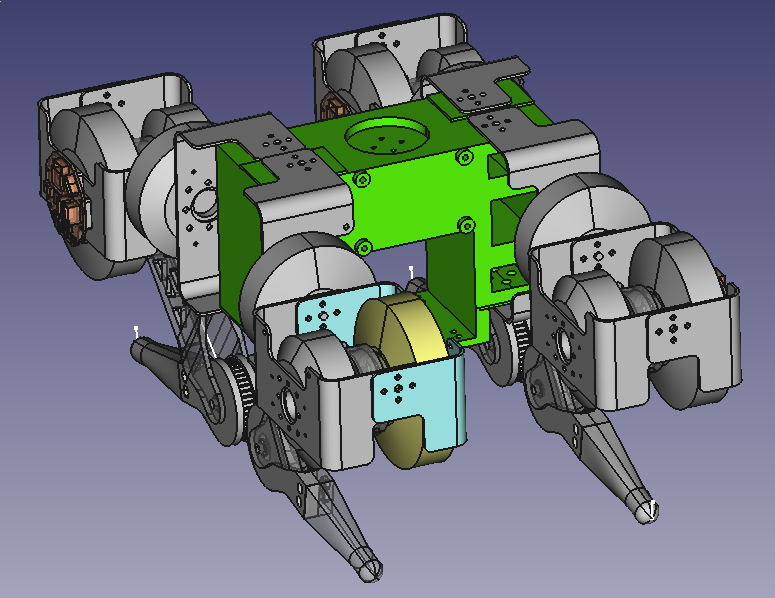
After getting the whole robot assembled, I quickly realized that changing the firmware on each of the 12 servos was going to be a big annoyance. Doubly so, because the lateral servo programming ports were unreachable with this chassis design without disassembly. Thus, I bumped up a deferred piece of work to implement a bootloader that would allow for reflashing the primary application over the RS485 communication bus.
Pre-bootloader state
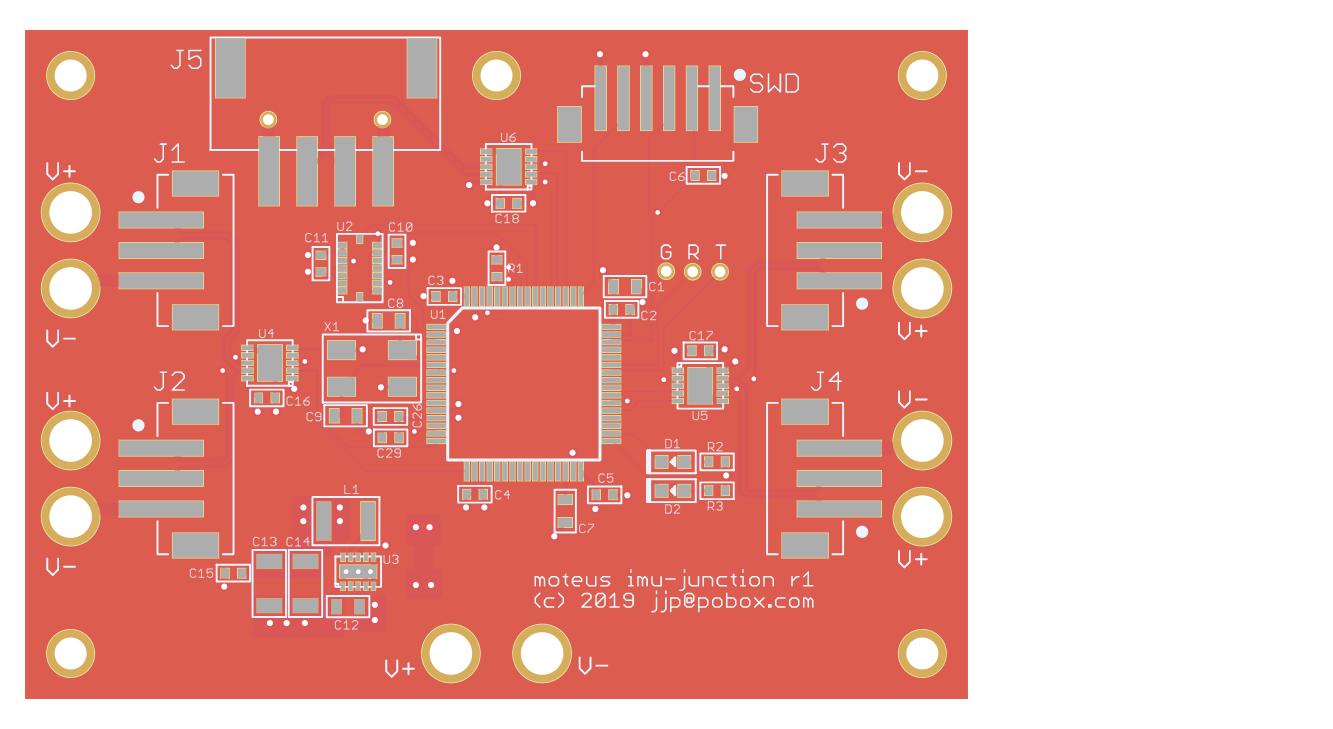
The moteus controller currently uses an STM32F446 controller, which has 512kb of flash memory. The memory map pre-bootloader looked like: