First closed loop vector control
I’ve reached a minor milestone in developing improved actuators for Super Mega Microbot. Previously I demonstrated basic closed loop control using a VESC. Now I have a custom control board running closed loop vector-based current and position control on a single brushless servo! I’ll hopefully write up pieces in more depth later, but this post can serve as a proof of existence.
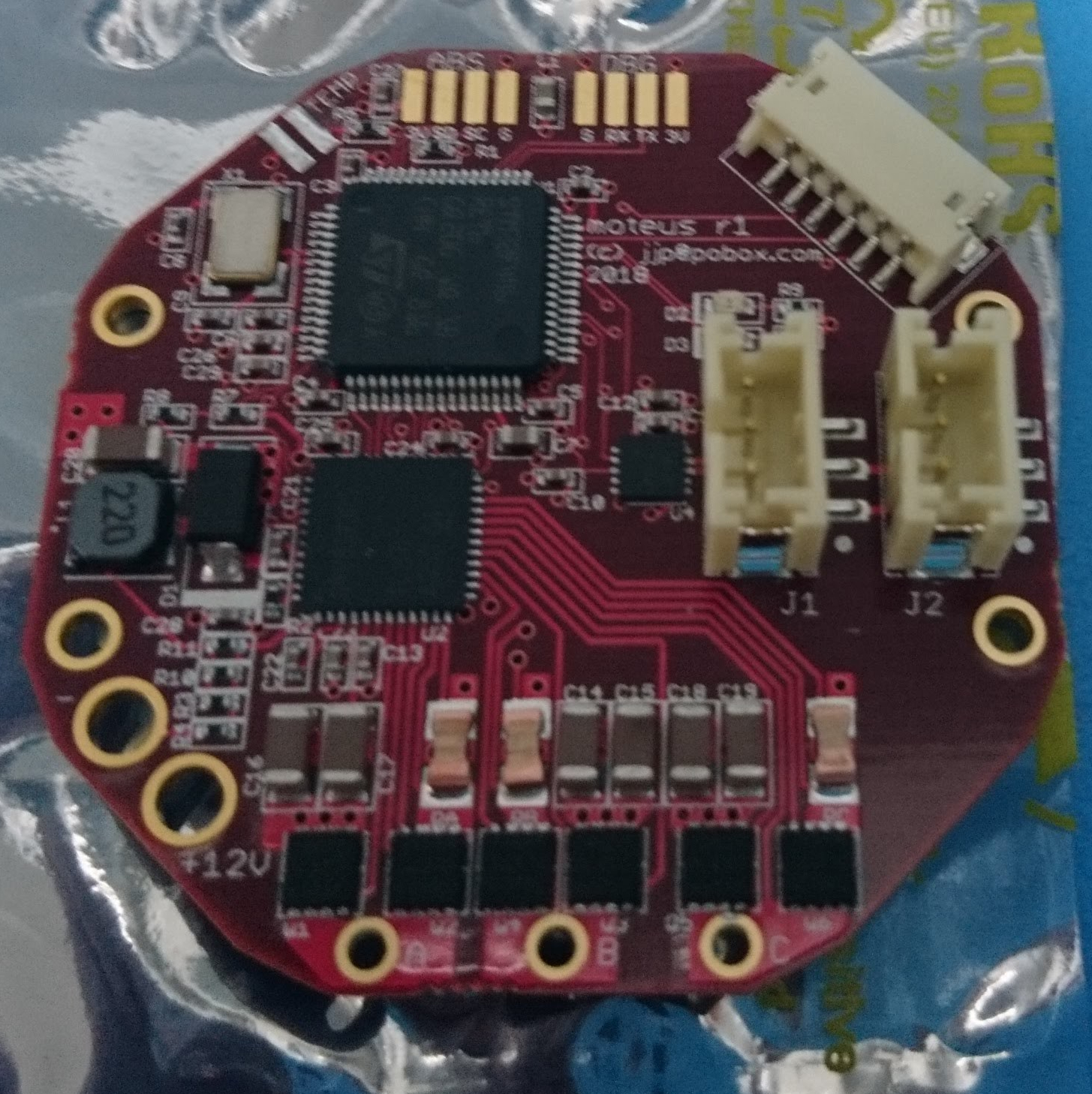
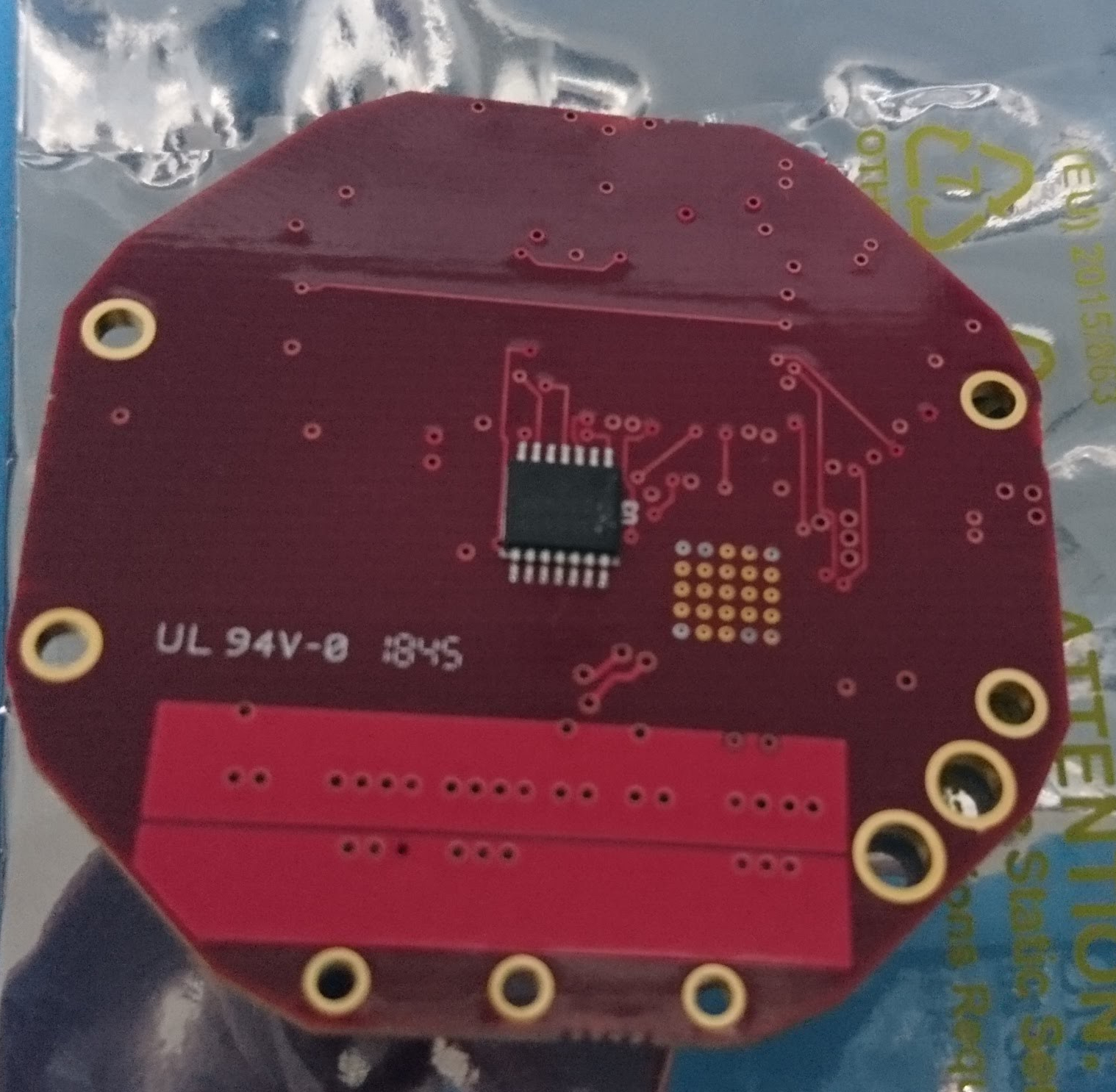
First, boards as received from MacroFab:
Mounted onto the planetary gearbox: